Quellenangabe: ESA, Frank Boukaert ATV Projekt Division, ESTEC Nordwijk
[size=18]Das russische Dockingsystem des ATV[/size][/b]
EinleitungDa das ATV konzipiert wurde um am russischen Teil der ISS zu docken war es sinnvoll keine eigene kostspielige
Entwicklung eines Dockingsystems zu starten, sondern statt dessen eine leicht modifizierte Version des russischen
Dockingsystems (RDS), welches bei den Soyuz-TM und Progress-M Fahrzeugen Verwendung findet, heranzuziehen. In einem Tauschabkommen wurde mit den russischen Partnern im Mai 1996 vereinbart, das die ESA das Data-Management-System (den Board-Rechner) für das Zvezda Modul zu verfügung stellt, und im Gegenzug zwei Flugmodelle des aktiven Docking Systems erhält.
Ziel muß es sein gefahrfrei einen sicheren Kontakt zwischen dem ca. 20 Tonnen ATV und der vielfach schwereren ISS herzustellen, ihre relativen Restgeschwindigkeiten zu dämpfen, sie auszurichten und eine stabile mechanische
Verbindung herzustellen welche auch in der Lage ist die Schubkräfte die bei Reboostmanöver des ATV auf die ISS
übertragen werden sollen zu beherschen. Die Verbindung wird druckbeaufschlagt, um aus dem ATV Versorgungsgüter entladen zu konnen. Nach dem Beladen mit Entsorgungsgütern erfolgt nach dem Undocking der destruktive Wiedereintritt in die Erdatmosphäre.
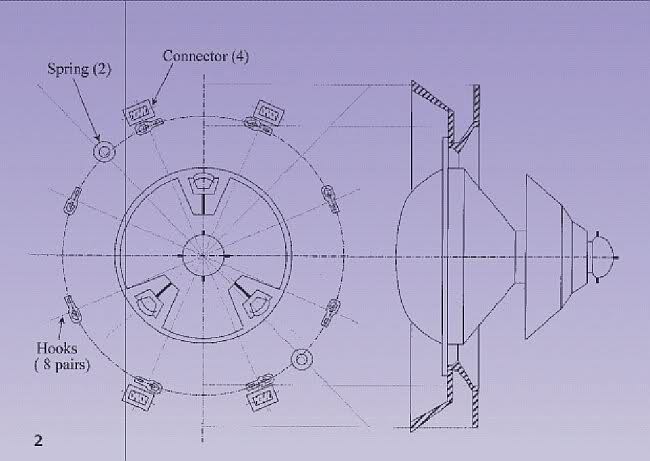
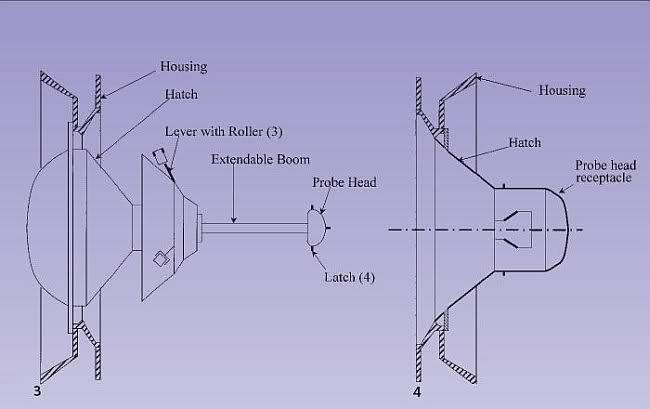
KomponentenDas RDS besteht aus einem aktiven Teil, welcher sich auf dem ATV befindet, und einem passiven Teil, der in Zvezda eingebaut ist. Der Aktive Docking Adapter (ADA) besteht aus einer Anordnung mit Verbindungsstellen und Haken, einer 80cm durchmessende Luke, einem Ausrichtungsmechanismus mit drei Hebeln und Walzen, eine ausfahrbare Sonde mit einem Kopf mit vier Klinken (Abbildungen 2 und 3). Der Passive Docking Adapter besteht ebenfalls aus einem Gehäuseteil mit Verbindungsstellen und Haken, einer Luke und dem Fangtrichter für die Sonde (Abbildung 4).
 Arbeitsweise
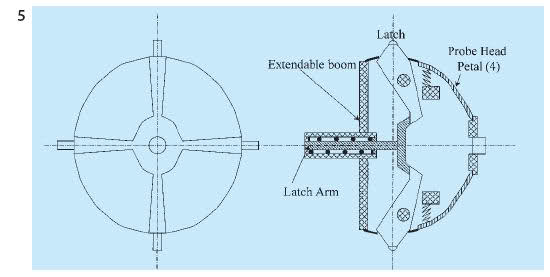
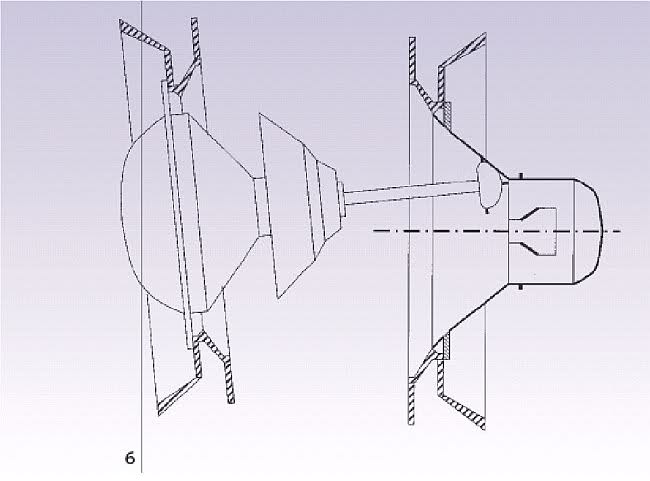
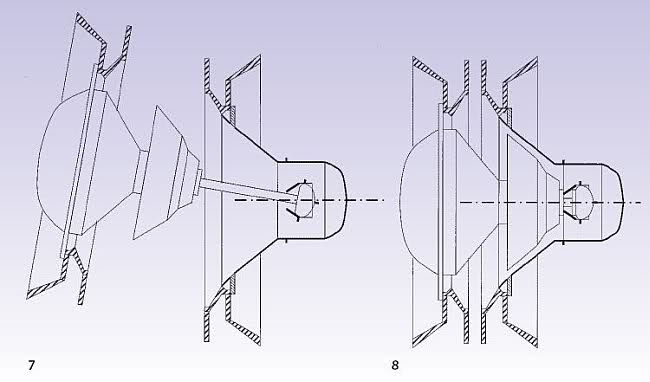
ArbeitsweiseKurz nach dem aktivieren des ATV nach dem Start wird die Sonde des ADA ausgefahren, was auch die Kontaktwalzen auf den Hebeln spreizt. Über die Sondenstange werden die Klinken positioniert. Wenn der Sondenkopf die Innenseite des Fangtrichter des PDAs berührt wird ein Blatt des Sondenkopfes nach innen gedrückt (Abbildung 5). Dadurch werden im Sondenkopf Schalter betätigt, welche der ATV-Steuerung Kontakt signalisieren(Abbildung 6), welche daraufhin einen Vorwärts-Schubimpuls auslöst. Dadurch gleitet der Sondenkopf weiter in Richtung Sondenschloß. Ein weiterer Kontaktschalter am Kopf der Sonde wird betätigt wenn die Sonde in das Sondenschloß eingefahren ist. Die Klinken am Sondenkopf haken in die Ausnehmungen des Sondenschloßes ein. Damit ist der Zustand "eingefangen" oder "soft-docking" erreicht (Abbildung 7). Während diesem Vorgang begrenzen ein System aus Federn und Dämpfern die axiale und seitliche Bewegung des Sondenauslegers und dämpfen die kinetische Energie des ATVs. Wenn die Sonde eingefahren wird, bewirkt die Kompression der Hebel und Walzen eine Ausrichtung von ADA und PDA.
Das Zurückziehen der Sonde wird fortgesetzt bis die Dichtungen von ADA und PDA Kontakt haben, die hydraulischen und elektrischen Verbindungen hergestellt , die Trennfedern komprimiert und alle Kontaktschalter am 1,3m durchmessenden Kranz betätigt sind (Abbildung

.
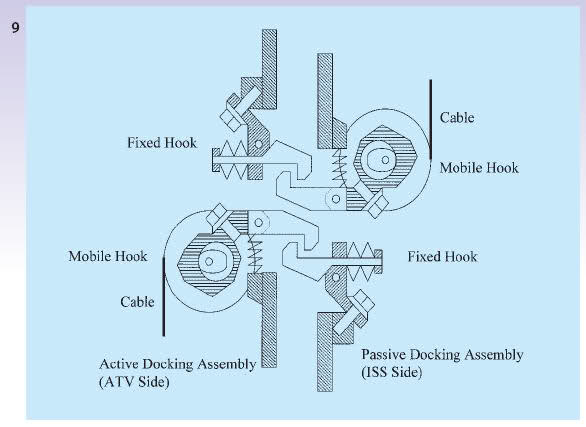
Wenn dies erreicht ist werden acht aktiv bewegbare Haken am Kranz zurückgefahren. Ein Elektromotor zieht an einem Kabel welches über eine Nocke den Haken zurückzieht. Die Haken am ADA verspannen sich mit an Federn befestigten Haken vom PDA. Durch das verpressen dieser Haken werden die Dichtungen, die Trennfedern und die Verbindungen in ihre endgültige Position gebracht (Abbildung 9). Weitere acht Haken die sich am PDA befinden werden nun zurückgezogen, die sich mit an federnd montierten Haken vom ADA verpressen. Damit ist der Dockingvorgang abgeschlossen und der Zustand "hard docking" erreicht.
Im nächsten Schritt wird der Sondenkopf durch eine leichte Vorwärtsbewegung entspannt, so das die Klinken des
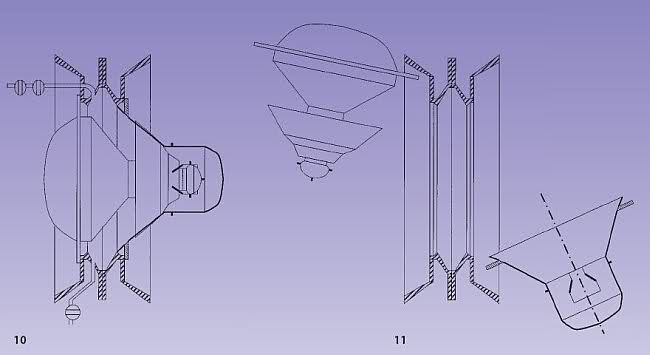
Sondenkopfes gelöst werden können, und der Sondenkopf frei wird. Bevor die Luken geöffnet werden können, muß nun noch der Bereich zwischen den Luken druckbeaufschlagt werden (Abbildung 10), indem zwei in Serie geschaltene Venitle vom ATV geöffnet werden. Der Druck zwischen den Luken wird auf einen etwaigen Druckabfall überwacht, um die sichere Funktion der Dichtungen zu überprüfen.
Die erste Luke kann nun geöffnet werden indem der Dockingtricher in Zvezda zurückgeschwenkt wird. Mittels eines langen Werkzeuges wird der ADA entriegelt in das ATV hineingeschwenkt (Abbildung 11).
Schlußendlich befestigt die Crew auch noch 16 Klammern am inneren Kranz der Verbindung um eine größtmögliche Versteifung der Verbindung zu erreichen.
Der ATV Entladung, Reboost, Lagekontrolle und Beladung steht nun nichts mehr im Wege.
 Der Abschied
Der AbschiedWenn die Abtrennung des ATV bevorsteht werden von der Crew die Klammern wieder gelöst, und beide Luken werden geschlossen. Durch öffnen eines Ventiles im ADA wird der Zwischenraum druckfrei gemacht, und die Luken auf Dichtheit überprüft. Die acht aktiv bewegbaren Klammern des PDA werden gelöst. Nach lösen der Klammern durch den ADA entspannen sich die Trennfedern und drücken das ATV von Zvezda weg.
FunktionssicherheitDie Verläßlichkeit des russischen Docking Systems ist absolut bemerkenswert. Eine Fehlfunktion ist dokumentiert vom April 1987 beim Docking von Kvant1 mit Mir. Das Schließen des Dockingmechanismuses wurde durch ein Stoffstück unterbunden, welches Kosmonaten in einm EVA schließlich entfernt haben. Eine weiterer solcher Vorfall ist auf der ISS aufgetreten, wo ein Dichtungsstück das Docking behindert hat. Nach entfernen dieses Fragmentes konnte ebenfalls gedockt werden. In der zwischenzeit und seither ist kein Problem mit dem Dockingmechanismus bekannt.
Als eine möglich Schwachstelle könnte der Motor für die Bewegung des Sondenkopfes angesehen werden, welcher nicht redundant ausgelegt ist. Dies wurde aufgrund der kleinen Bauform des ADA in dieser Form ausgeführt. In einem möglichen Fehlerszenario könnte ein Docking, ohne das die Klammern schließen könnten, auftreten. Vorgesehen sind zusätzlich auch noch vier Pyrobolzen mit denen in einem Notfall das ATV vom Großteil des ADAs getrennt werden kann. Abflug von der ISS und destruktiver Wiedereintritt in die Erdatmosphäre sind dabei weiterhin möglich.
Auch die Klammern von ADA und PDA besitzen Pyrobolzen falls sie sich einmal nicht lösen lassen sollten.
Sämtliche Pyrobolzen sind außer für Testzwecke niemals im operativen Fall zum Einsatz gekommen.
SchlußwortDas russische Dockingsystem welches ursprünglich in den späten 1960er Jahren für die Saljut Raumstationen entwickelt wurde, aber beständig optimiert,ist ein Zeugnis für Erfindungsgeist und Geschicklichkeit der Ingenieure von RSC Energia welche vor der gewaltigen Aufgabe gestanden sind, auf kleinstem Raum und bei niedriger Masse (235kg) ein robustes und sicheres System zu erdenken. Auch wenn die Arbeitsbedingungen nicht jene Möglichkeiten wie wir sie heute kennen, oder auch wie sie westlichen Mitbewerbern zur Verfügung standen, so ist dennoch durch sorgfältige und geduldige Arbeit und Verfeinerung ein System entstanden das auch heute noch als ein Juwel der Ingenieursarbeit bezeichnet werden kann.
m.f.G.
James