Konzepte, Empfehlungen, Hoffnungen…
-
-
Es gibt neue Informationen zu den perspektivischen russischen Luna (Globe/Resurs …) Projekten.
Empfehlungen zu den jeweiligen Auslegung aus Variantenvergleichen der technischen Konzepte werden ebenso gegeben, wie der Anlass zur Hoffnung der beteiligten Teams, Forscher, Techniker und des geneigten Publikums, die Realisierung dieser Projekte zu leben und zu erleben wird weiter „am Leben“ erhalten.
Von besonderem Interesse sind auch Informationen über mögliche Fahrzeuge, die auf der Mondoberfläche zum Einsatz kommen sollen – quasi „>Luna-25ff Lunochods“.
Dabei gibt es zunächst erst mal sehr allgemeine Hinweise für eine kleine Fahrzeugvariante
„Малый космический аппарат «Луноход-М» (kleiner kosmischer Apparat Lunochod-M).
Dieses wäre dann quasi Ersatz für den ursprünglich indischen Rover, der im Projekt Chandrayaan-2 weiterverfolgt wird.
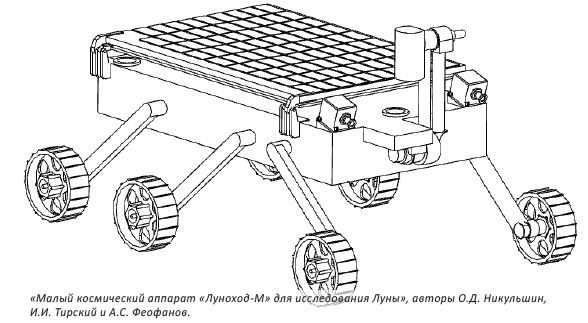
Bild aus Seite 4
Bildquelle und Dokumentenlink:
https://www.laspace.ru/upload/novator/%E2%84%9610_16.pdfWeiterhin gibt es durchaus schon sehr detaillierte Informationen für ein größeres Fahrzeug.
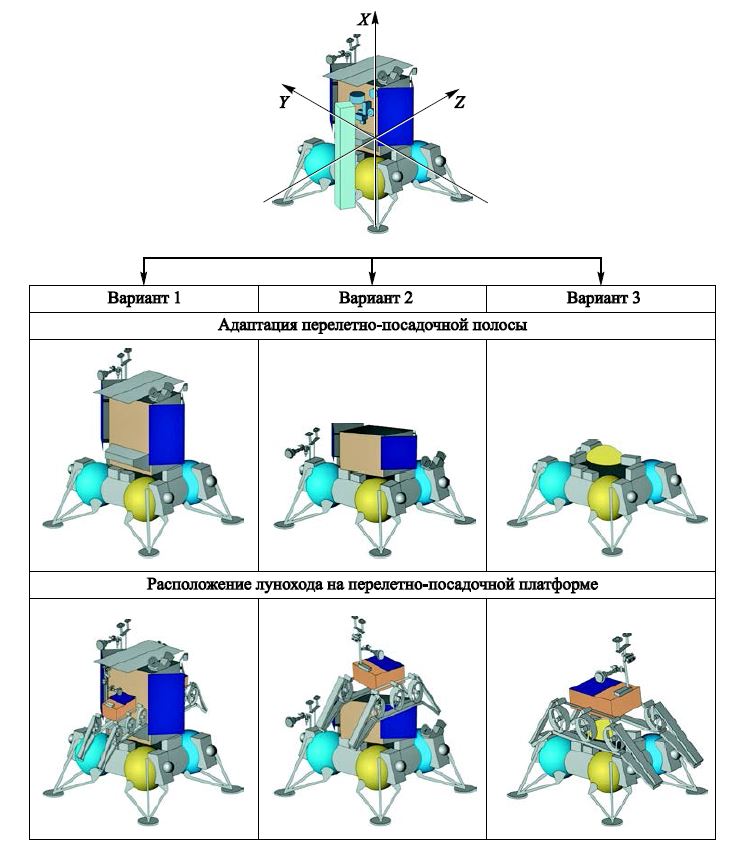
Im zugehörigen Dokument werden Konzepte zu Landern mit Fahrzeug dargestellt.
Eingebettet sind die Ausblicke und Vorschläge in einen Rückblick auf die Projekte von Luna-9 bis Luna-24, wobei eine schöne systematische Darstellung der Varianten basierend auf dem Grunddesign der 2. Generation (E-6) und 3. Generation (E-8) aufgezeigt wird. Die Doppelnennung von Luna-14 (falsch bei den Landesonden) ist entsprechend zu beachten.
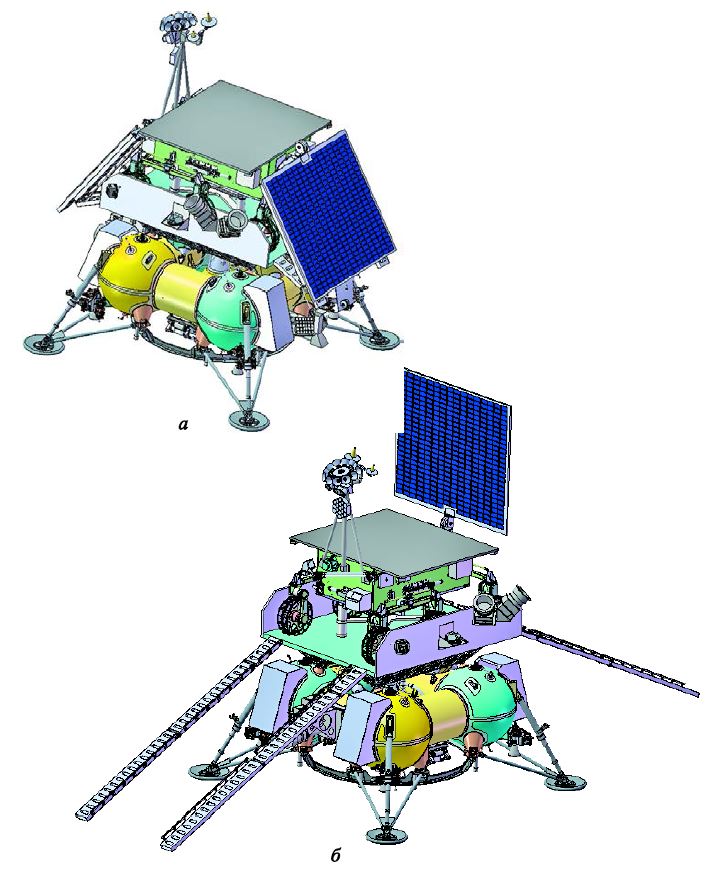
Für die neuen Projekte wird ein Prinzipbaukasten für die 6 möglichen Grund-Landeversionen in 3 Hauptvarianten mit hohem, mittelhohen und flachem Aufbau dargestellt, wobei es nochmal zu einer Kombination mit und ohne Fahrzeug (klein und groß) kommen kann.
Bildquelle und Dokumentenlink:
http://engjournal.ru/articles/1492/1492.pdf--------- -------------
Darstellung des Fahrzeuges mit Hauptelementen :
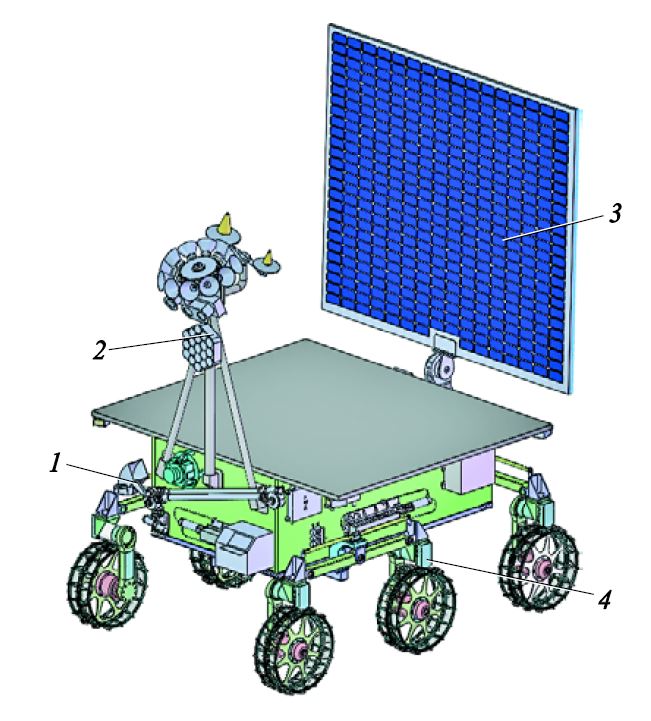
1 Hauptkörper
2 Träger/Stange des Visualisierungssystems
3 Solarzelle
4 Fahrgestell
Zum „großen“ Lunochod ergibt sich bei der Betrachtung der Darstellungen und aus den Textinformationen, daß das Thema „Wheel walking“ und entsprechende Radaufhängungskonzepte beim neuen Projekt thematisch verfolgt werden.
----
Damit ergibt sich quasi eine Zweiteilung der Ansätze mit „Wheel walking“ und Pendelachsen für ESA/Roscosmos - Rover und „Rocker Bogie“ für NASA und CLEP - Rover. Wobei bei den gezeigten Pendelachsen die Achsschenkel mit Parallelogrammführung in senkrechter Position gehalten werden. Zum Vergleich: beim Exomars Rover ist hier der Deployment Mechanismus als 3. Antrieb gewählt. Da das Mondfahrzeug gegenüber der Marsvariante nicht so kompakt in eine Kegelkapsel reinpassen muß, wird dann wahrscheinlich ein „einfacherer“ Schwenkantrieb am Achsschenkel verwendet, der gegenüber einem Deployment Mechanismus nicht so einen großen Winkelbereich abdeckt und somit auch nicht so hohe Momente in den max. Seitenauslenkungen erzeugen/aushalten muss.
--- --- --- ---
Die Grundlage für die Wahl des Fahrwerkstyps stellen sicher die vielen vorangegangenen Konzeptuntersuchungen und Projekte dar, die u.a. auch mit ESA, DLR etc. in den letzten Jahr(zehnt)en gelaufen sind.
Ein weiteres, relativ junges Dokument zur Fahrwerksauslegung und Variantengegenüberstellung mit Wichtung, zeigt als Favorit eine Lösung mit Pendelachsen und schwenkbaren Radschenkeln, die dem Vorschlag im Design des neuen Lunochod-Fahrwerks sehr sehr ähnelt.
Im Fazit wird aufgezeigt, daß eine Durchmesservergrößerung der Räder und deren Breite vorteilhaft sind – aber in Bezug auf die (Bauraum) Integration in das Fahrzeug und Landemodul wiederum Grenzen bestehen.
Fahrwerke auf Rocker-Bogie und Dreipunkt – Pendelachsen Aufhängungsbasis wurden ausführlich verglichen und erreichen in Summe ähnliche Leistungen, wobei Einzelkriterien auch starke differieren.
Als großer Nachteil der Rocker-Bogie Systeme wird die Bauraumintegration des Ausgleichsgetriebes angesehen. Beispiele: beim Yutu Rover geht das Ausgleichsbetriebe unter dem Hauptkörper quer rüber und bei Curiosity geht ein Gestänge mit Wippe oberhalb seitlich und über den Hauptkörper quer rüber.
Da auf dem Mond das Thermomanagement an der Fahrzeugoberfläche mit OSR Beschichtung (Tag) bzw. Deckel zu (Nacht) erfolgt, bleiben hier quasi nur Konzepte mit unten liegendem Ausgleichsgetriebe als Lösung, wenn Rocke Bogie Design eingesetzt wird.
Mit den nur seitlich bzw. hinten angebrachten Dreipunktaufhängungen, wie vorgeschlagen, wird damit eine flexiblere Bauraumausnutzung des Fahrzeughauptkörpers möglich.
Weitere Vorteile bei der Dreipunktaufhängung mit Parallelführung werden in der geringeren Performanceabhängigkeit von der Höhe des Drehpunktes gesehen. Und somit kann die Positionierung an den Seitenwänden des Fahrzeuges ebenfalls mit größerer Freiheit gewählt werden.
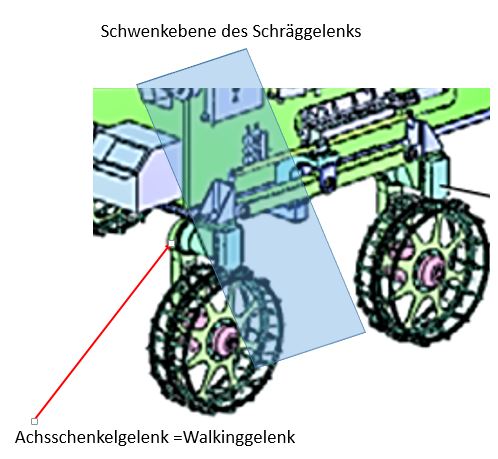
Bei dieser Lösung ist allerdings die Stabilität des Gesamtsystems zu beachten, wenn die Pendelachsen stark ausgelenkt werden, da sich die projizierte Abstützlänge (netto horizontal) verringert. Gibt es allerdings einen zusätzlichen Verstellantrieb an den Achsschenkeln, wie er bei Konzepten mit Wheel walking Mechanismus vorhanden ist, kann dieser Nachteil auch ausgeglichen werden, indem die Achsschenkel dann seitlich im gleichen Winkel ausschwenken.
Bild stellt die Verkürzung des Radabstandes beim Auslenken der Parallelaufhängung dar.
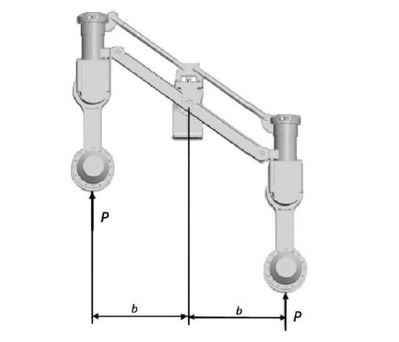
Der entsprechende Schwenkantrieb um die Räder zur Seite auszulenken ist oben an den „pleuelförmigen“ Achsschenkeln zu erkennen.
Bildquelle und Dokumentenlink:
http://izv-tn.tti.sfedu.ru/wp-content/uploads/2016/1/13.pdfZur Radlenkung ist im obigen Bild ebenfalls an den direkten Anbindungen der Parallelführung ein Drehantrieb vorhanden (Zylinder). Damit ist das Rad richtungsschwenkbar.
Demgegenüber ist bei den Bildern zum Vorschlag für das „>Luna-25ff Lunochod“ an dieser Stelle kein direkter Antrieb erkennbar. Von den Enden der beiden Querstangen der Parallel-Lenker wird mit einem abgeschrägten U-Winkel die Verbindung zu einem darunter liegenden Element der Achsschenkelanbindung hergestellt. Dieses Element hat jeweils eine diagonale Trennlinie.
--- --- ---
Überlegung zur Radlenkung:
An den Enden der Aufhängungstrapeze sind U-Winkel mit dreieckiger Seitenkontur zu erkennen. Darunter dann die schräg geteilte Anbindung der Radschenkel. Ich meine die grün/blau Verbindung quer direkt über dem Rad. Sieht aus wie manche Rückspiegelanbindungen am PKW (Spiegel klappt nach oben/Seite statt nach hinten), die damit einen einfachen Klappmechanismus realisieren. Damit kann man das Rad lenken/drehen, braucht aber nochmal unterhalb dieses „Schräggelenks“ eine weitere bewegliche Achse, damit es am Boden nicht schräg steht (nur an einer Seitenkante aufliegt). Mit dem Achsschenkelgelenk =Walkinggelenk kann dieser Ausgleich erfolgen. Das wäre mal ein interessanter Ansatz – bin mal gespannt wie das dann am realen Objekt aussieht oder hier nur der Eindruck einer solchen Lösung durch die gewählte Darstellung entsteht.
--- --- --- ---
Fahrzeug und Lander im Flug und am Mondboden
Interessant ist die Ablage der Solarzelle schräg nach hinten mit Auflagepunkt an der hinteren Fahrrampe. So wird die Fluglage zum Mond aussehen. Für die Landung erwarte ich das Zuklappen um maximalen Schutz vor Staub zu erhalten.
Nach erfolgreicher Anlandung fährt das „>Luna-25ff Lunochod“ über die aufgeklappte Rampe – vorzugsweise nach vorne herunter.
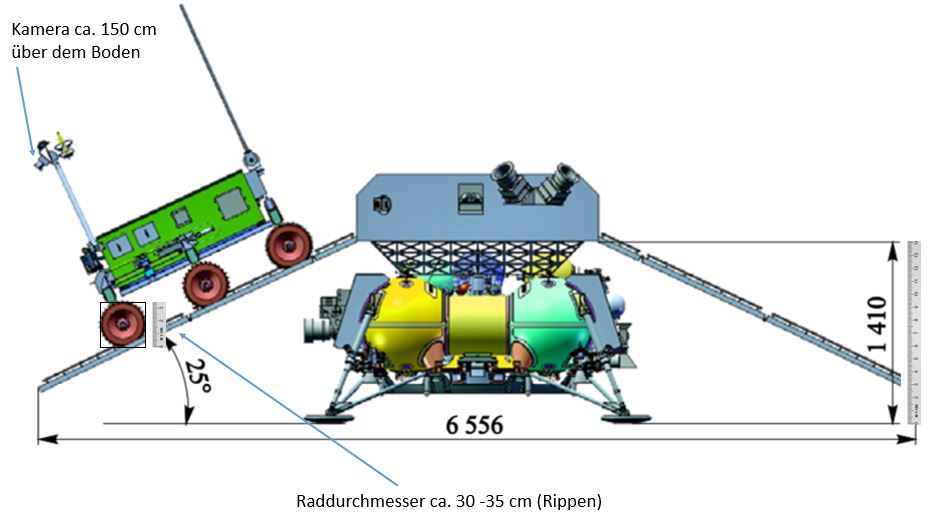
Aus den angetragenen Hauptabmessungen ist eine Abschätzung zu Raddurchmesser (ca. 30 bis 35 cm) und Kamerahöhe möglich.
Die Kameraposition befindet sich auf einer Höhe von ca. 1,50 m über dem Boden. Das dürfte diesmal keine Höhenpositionsdiskussion nach sich ziehen.
Bei der Landung wird der Solarzellendeckel dann wohl zugeklappt sein und für das Thermomanagement und die Fahrbereitschaft dann nach definierter Zeit (Staubwolke) aufgeklappt werden.
In wieweit der kombinierte Kamera-Antennenmast umklappbar ist und entsprechende Flug- und Landeposition einnehmen kann ist zu wenig zu erkennen.
Im vorderen Bereich ist noch ein Greifer/Manipulator zu sehen und weitere wissenschaftliche Gerätegehäuse.
--- --- --- ---
Das Design des Fahrzeuges ist konzeptionell in Fahrwerk und Hauptkörper unterteilt. Für den Hauptkörper ist die Möglichkeit der Variantenbildung mit Höhenskalierung und Ausstattungsänderung vorgesehen.
Der Hauptkörper ist mittels Leichtbauwabenplatten und abdichtender Bauweise ausgelegt. In ihm befinden sich Ausrüstungsbauteile, die mit dem Thermoregulierungssystem innerhalb vorgegebener Temperaturparameter gehalten werden. Gesamtabmessungen des Hauptkörpers/Instrumentenbehälters (ohne Kühlkörper ) 1200 × 715 × 420 mm.
Das Thermoregelungssystem basiert wieder auf einer RHU und Radiator (OSR?) /Deckelsystem, wobei wieder die Solarzellen im Deckel angeordnet sind.
Interessant ist auch das „Antennenbukett“ auf dem Kameramast.
12 trichterförmige Antennen sind sphärisch um eine kegelförmige Zentralantenne angeordnet. 2 weitere kegelförmige Antennen daneben ergänzen das System.
Ein Verstellantrieb ist auf den ersten Blick nicht zu erkennen.
Damit dürfe die Sendeabdeckung einer Halbsphäre über dem Fahrzeug möglich sein.
D.h. in allen „normalen“ Fahrsituationen ist jeweils ein Bereich des direkten Funkkontaktes zur Erde abgedeckt. Wobei sich die Frage stellt, ob jeweils nur Antennen im optimalen Sende/Empfangsbereich angesteuert werden oder alle.
Eine Lösung mit 3 festen Antennen, die winkelversetzt insgesamt einen größeren Senderichtbereich abdeckten gab es z.B. bei Luna-19/22 auch schon mal. Damit konnte auf eine Richtmechanik und dessen Ansteuerung verzichtet werden.
Zum Vergleich: Bei den E-8 basierenden Lunochods war die Hauptantenne mit 2 Richtantrieben (Höhen- und Seitenwinkel) versehen, die durch einen Antennenoperator extra angesteuert wurden um auch bei Fahrt ständig eine stabile Sendeverbindung zur Erde sicherzustellen.
Unter dem Antennensystem sind 3 Kameras (1 Monokular und 1 Stereo) zu erahnen. Weiterhin ist unter dem Kamerasystem ein Sechseck mit 19 runden Einzelelementen zu erkennen – Laserretroreflektor??
Bin schon sehr gespannt welche Empfehlungen hier weiterverfolgt werden und wie es insgesamt weitergeht.
dksk