Hallo Zusammen,
die zwei möglichen Landeplätze in den Regionen Oxia Planum und Mawrth Vallis.Das mögliche Landegebiet
Oxia Planum.Wenn man genauer hinsieht, dem kann das Bild unscharf erscheinen. Dies ist darauf zurückzuführen, dass an dem Aufnahmetag, am 17 September 2018, immer noch zusätzlicher Staub in der Atmosphäre durch den massiven globalen Sommerstaubsturm vorhanden war.
Die Karte wird hier mit einem Maßstab von 25 Zentimetern pro Pixel projiziert. [Die ursprüngliche Bildskala beträgt 28,3 cm pro Pixel (mit 1 x 1 Binning). Objekte in der Größenordnung von 85 Zentimetern werden aufgelöst. Norden ist oben.

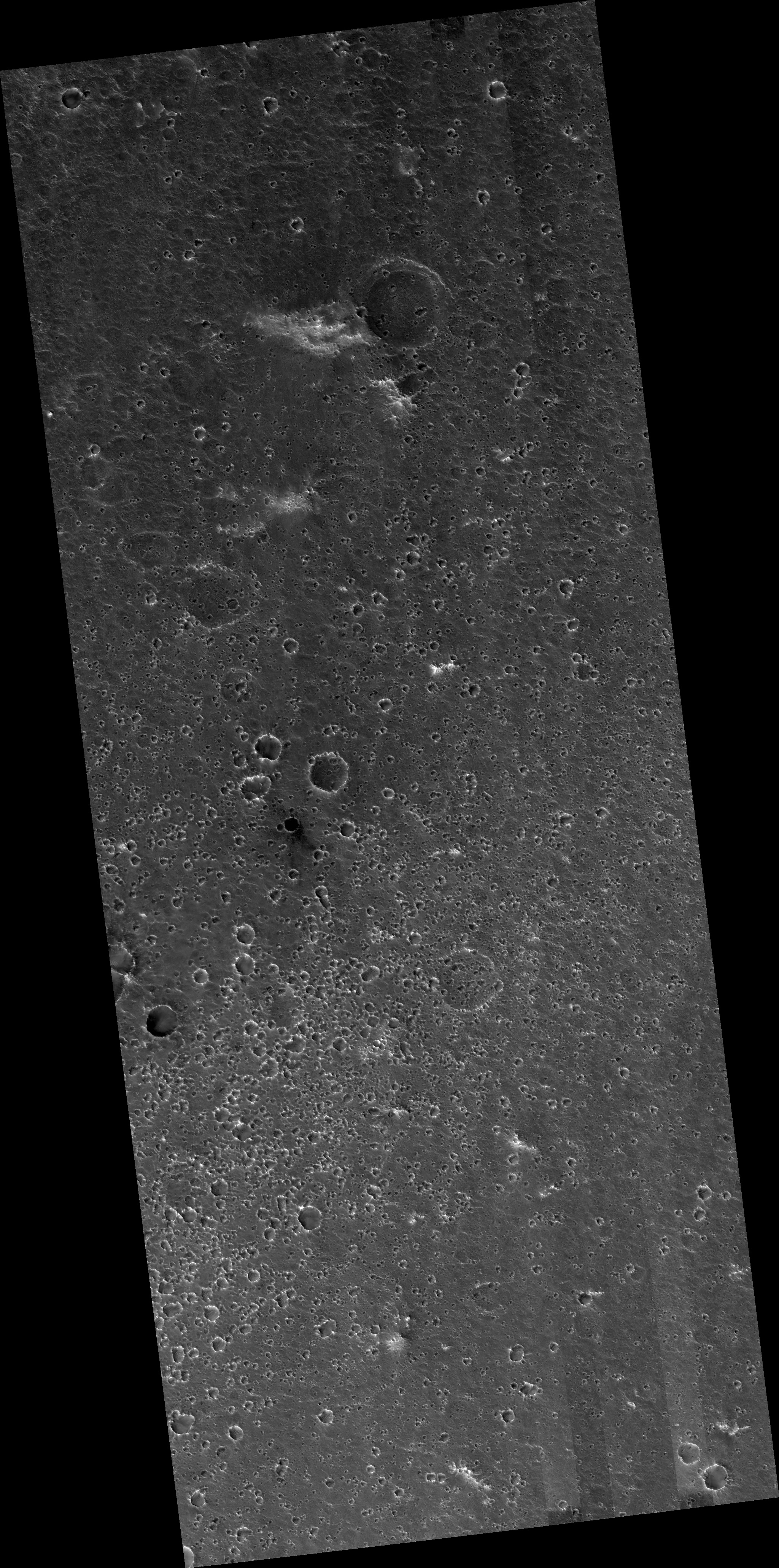 http://photojournal.jpl.nasa.gov/catalog/PIA22805https://hirise.lpl.arizona.edu/ESP_056916_1990
http://photojournal.jpl.nasa.gov/catalog/PIA22805https://hirise.lpl.arizona.edu/ESP_056916_1990Die Karte umreißt die Grenze (rot) der Reichweite der möglichen 120 x 19 km Landung Ellipse, mit zusätzlichem Erweiterungen des Randes. Höhenkonturen sind ebenfalls angegeben. Die Farben repräsentieren die Vielfalt der Oberflächen-Terrains, einschließlich Ebenen (grüne Schattierungen), Kanäle (Blues), Krater (gelb, mit schwarzen Umrisse) und windgeblasen Strukturen (rosa). Es handelt sich nicht um eine geologische Karte, die für die wissenschaftliche Analyse bestimmt ist, sondern ein Werkzeug, mit dem verschiedene Oberflächentexturen identifiziert werden können und wo mögliche Gefährdungen liegen können.
Das Hintergrundbild stammt aus dem Instrument des Thermal Emission Imaging System auf dem Mars Odyssey Orbiter der NASA.
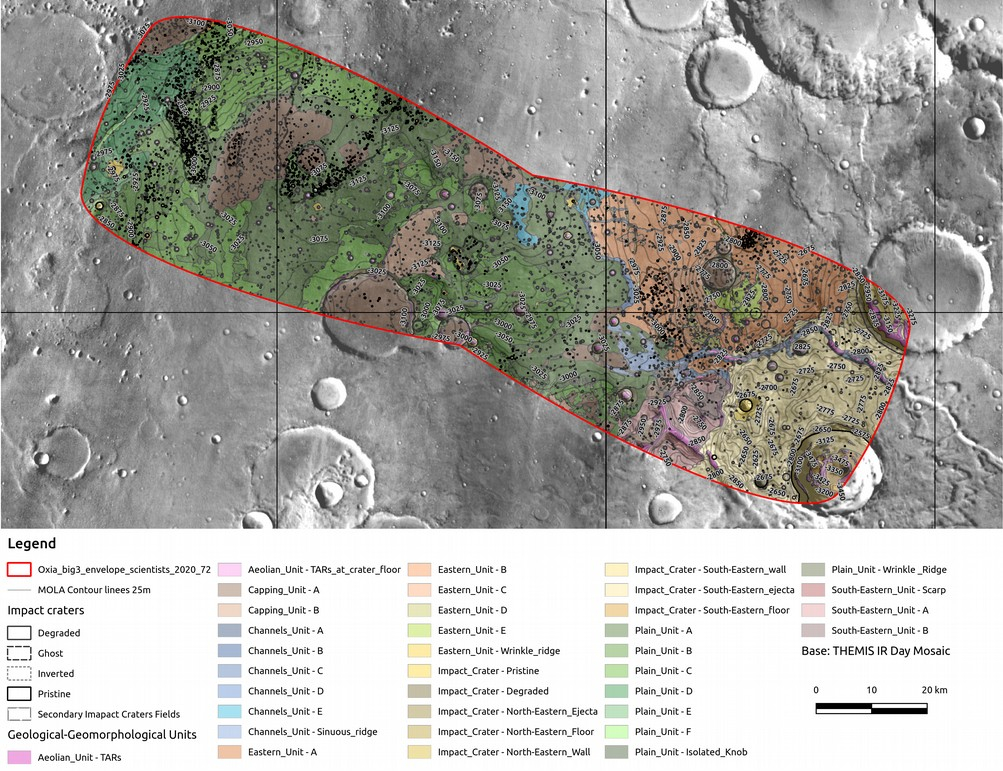 Credit: Base map: NASA/JPL-Caltech/Arizona State University; analysis: IRSPS/TAS-Ihttp://exploration.esa.int/mars/58959-oxia-planum-texture-map/https://www.esa.int/Our_Activities/Space_Science/ExoMars/Final_two_ExoMars_landing_sites_chosen
Credit: Base map: NASA/JPL-Caltech/Arizona State University; analysis: IRSPS/TAS-Ihttp://exploration.esa.int/mars/58959-oxia-planum-texture-map/https://www.esa.int/Our_Activities/Space_Science/ExoMars/Final_two_ExoMars_landing_sites_chosenDas mögliche Landegebiet
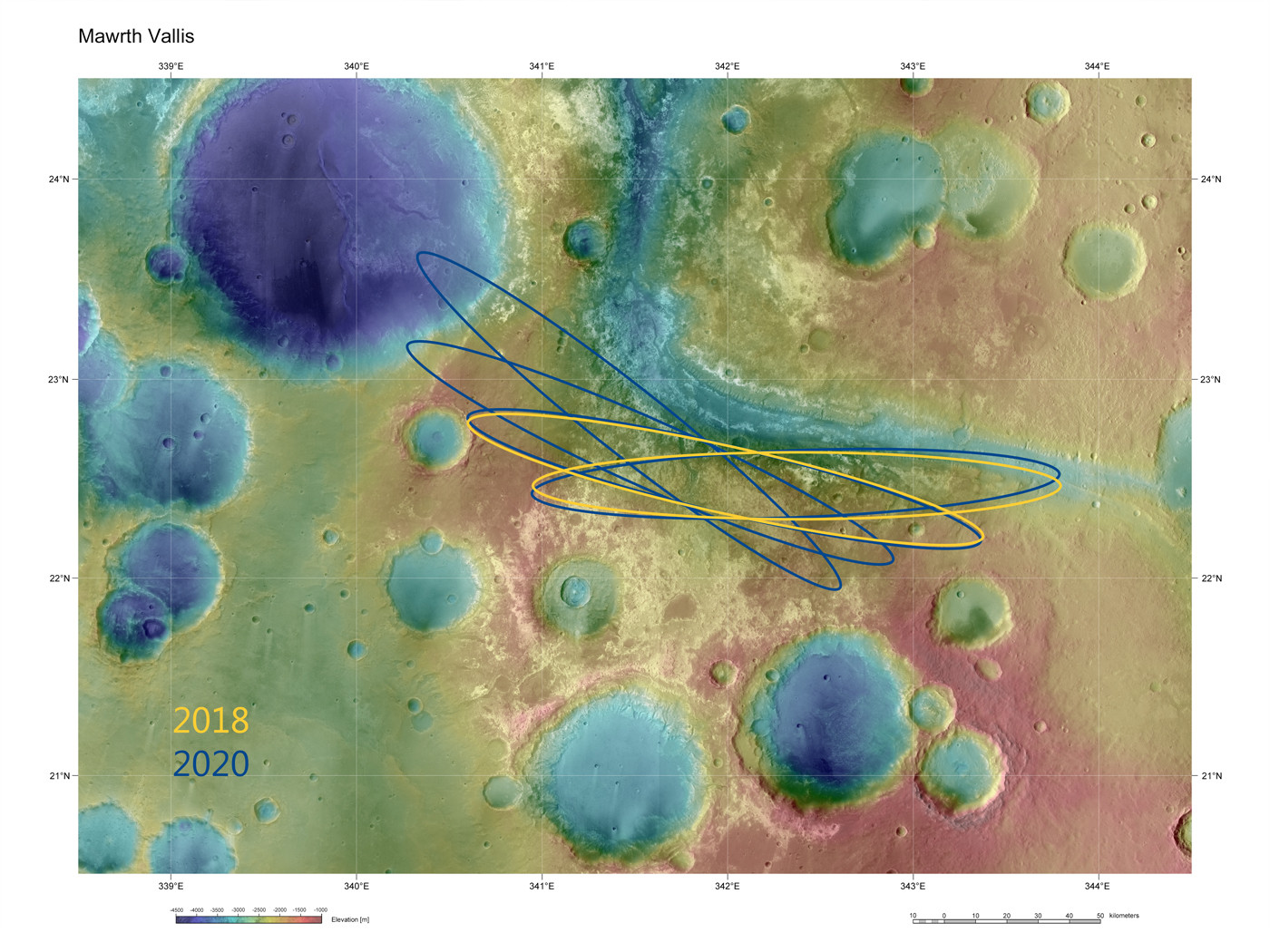
Mawrth Vallis. Der Name stammt aus dem walisischen Wort für Mars
("Mawrth") und das lateinische für Tal
("Vallis"). Die Region
Mawrth Vallis (etwa 22 ° N, 342 ° Ö) liegt an der Stelle, an der das Hochland von
Arabia Terra auf das Tiefland von
Chryse Planitia trifft. In diesem Gebiet befindet sich ein großer Abflusskanal, der als
Mawrth Vallis bekannt ist, der einst große Mengen Wasser in die nördlichen Ebenen abführte. Der geplante Landeplatz für ExoMars liegt südlich dieses Kanals .Mit einer Länge von 600 km und einer Tiefe von bis zu 2 km ist es eines der größten Täler auf dem Mars.
Das Bild habe ich von png in jpg umgewandelt.
 Credit: ESA/DLR/FU Berlin & NASA MGS MOLA Science Teamhttp://exploration.esa.int/mars/54721-mawrth-vallis/https://www.esa.int/spaceinimages/Images/2016/09/Mawrth_Vallis_martian_mosaic
Credit: ESA/DLR/FU Berlin & NASA MGS MOLA Science Teamhttp://exploration.esa.int/mars/54721-mawrth-vallis/https://www.esa.int/spaceinimages/Images/2016/09/Mawrth_Vallis_martian_mosaicDie farbcodierte Topographiekarte der Region
Mawrth Vallis. Weiß und Rot zeigen die höchsten Gebiete, während Blau und Purpur ein Gelände mit niedrigerer Höhe bedeuten (siehe Balken oben rechts).
 Copyright: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO http://m.esa.int/spaceinimages/Images/2016/07/Mawrth_Vallis_topography
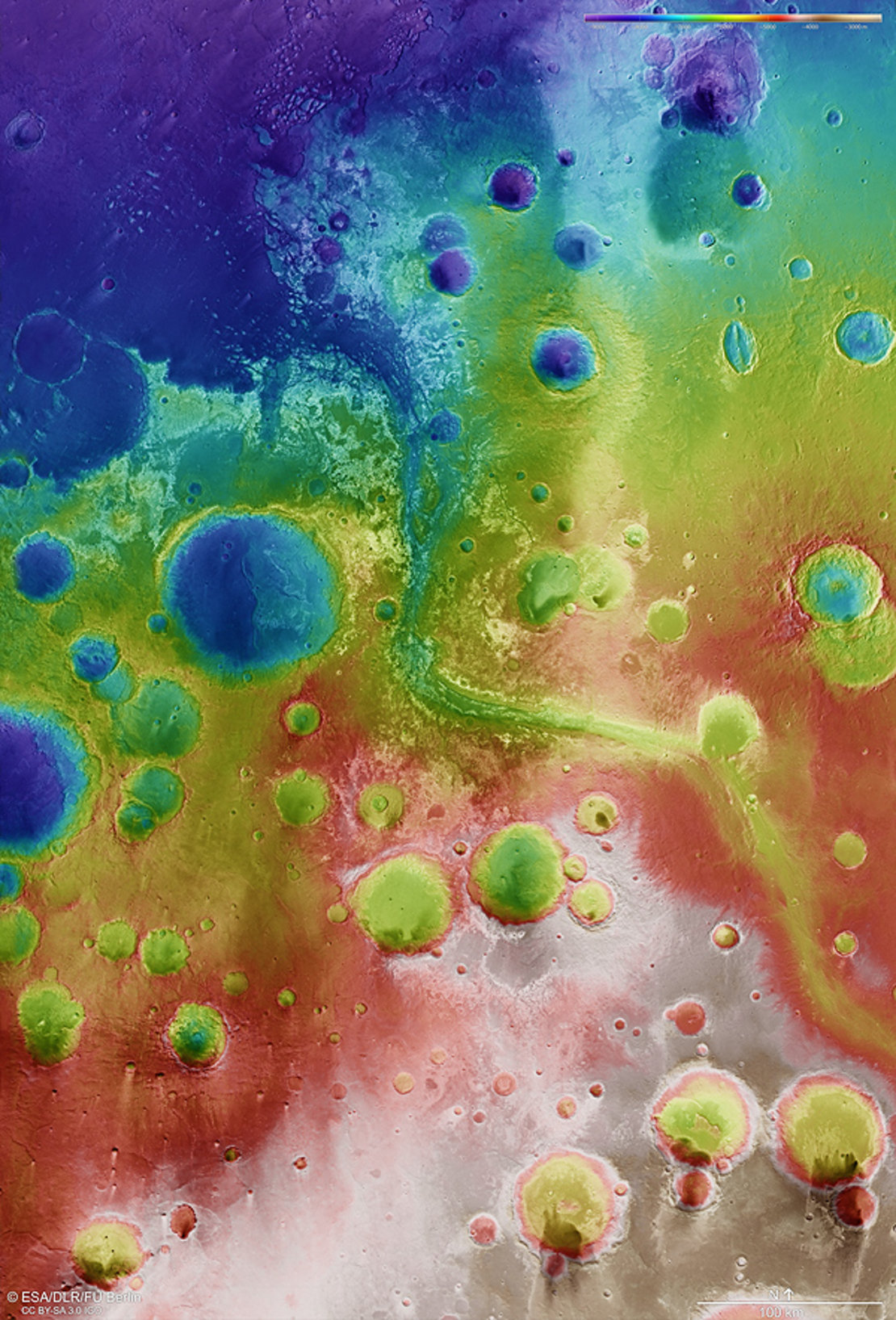
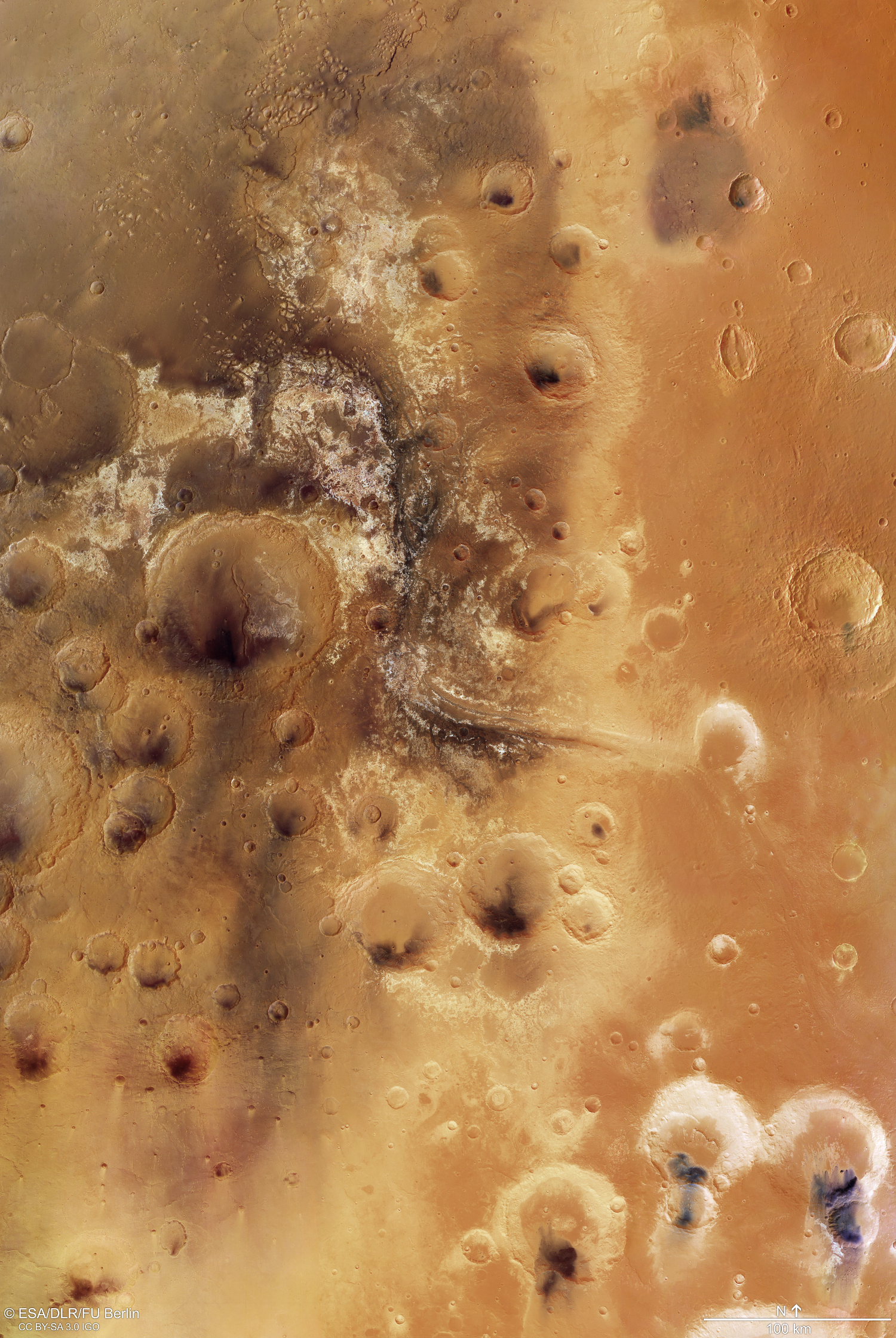
Copyright: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO http://m.esa.int/spaceinimages/Images/2016/07/Mawrth_Vallis_topographyDieses Mosaik entstand aus neun Einzelbildern, die mit der hochauflösenden Stereokamera der Mars Express-Raumsonde der ESA aufgenommen wurden, die den Mars seit Ende 2003 umkreist. Es handelt sich hierbei um eine Reihe von Bildern dieser Region, die zuvor am 7. Juli 2016 auf der DLR-Website und der Homepage der Freien Universität Berlin veröffentlicht wurden.
In diesem Bild steht
Mawrth Vallis im Mittelpunkt, ein 330 000 km² großes Gebiet, dass das Tal umgibt. Mit einer Länge von 600 km und einer Tiefe von bis zu 2 km ist es eines der größten Täler auf dem Mars. Einmal durchliefen vermutlich riesige Wassermengen von einem höher gelegenen Bereich, von dem ein Teil unten rechts im Bild zu sehen ist, in die nördlichen Ebenen oben links.
Zu den bemerkenswerten Merkmalen gehören die großen Belichtungen der hell getönten Schichtsilikaten (verwitterten Tonmineralien), die entlang des Verlaufs liegen. Schichtsilikate auf dem Mars sind ein Beweis für das Vorhandensein von flüssigem Wasser in der Vergangenheit und weisen auf die Möglichkeit hin, dass bewohnbare Umgebungen auf dem Planeten bis vor 3,6 Milliarden Jahren existieren konnten.
Die dunkler Felsen, Überreste einer alten Vulkanasche, bedeckt viele der Tone und könnte Spuren antiker Mikroben im Gestein vor Strahlung und Erosion schützen.
 Copyright: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO http://exploration.esa.int/mars/54721-mawrth-vallis/http://www.esa.int/spaceinimages/Images/2016/09/Mawrth_Vallis_martian_mosaichttps://m.esa.int/spaceinimages/Images/2016/09/Mawrth_Vallis_martian_mosaic
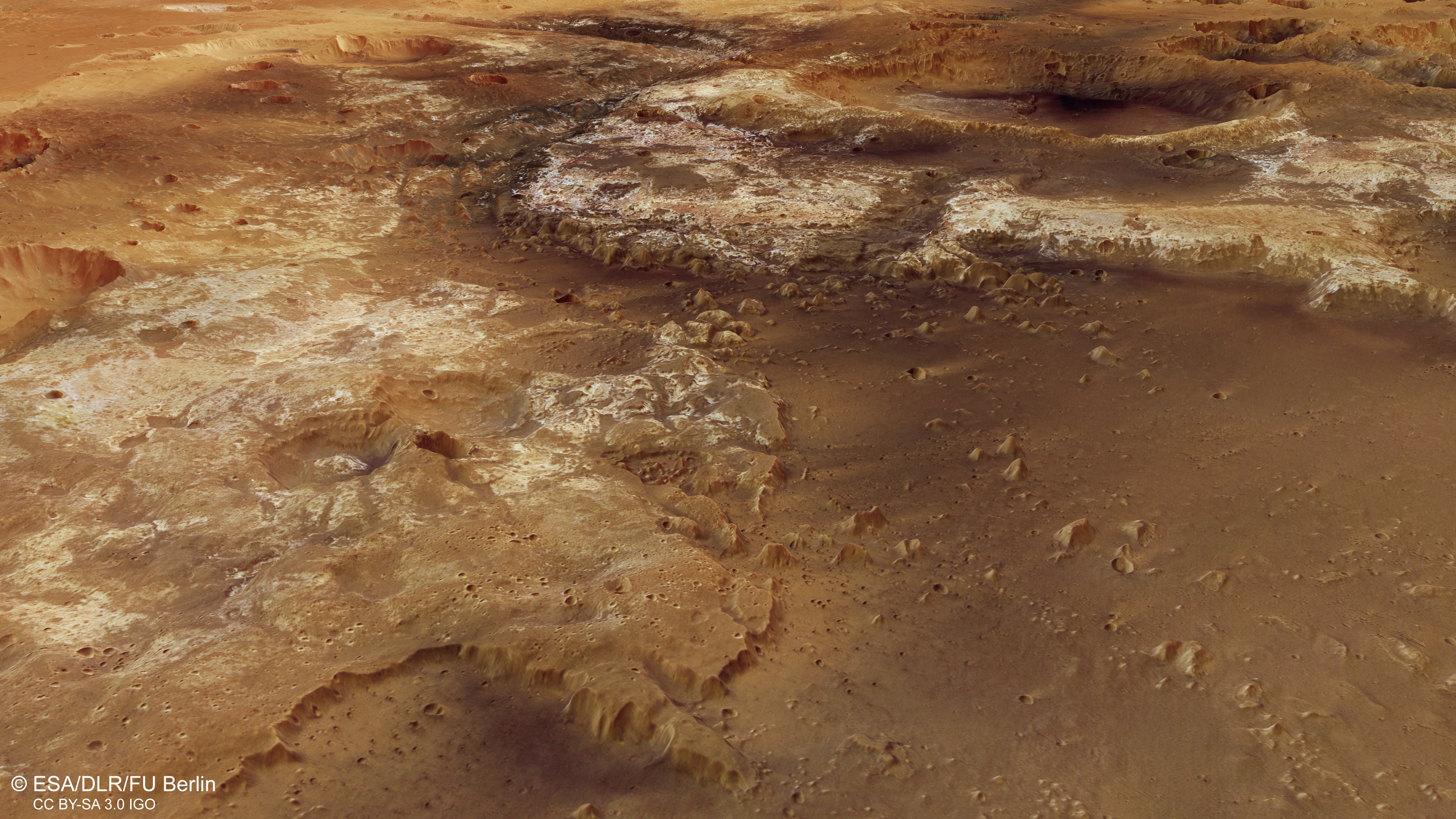
Copyright: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO http://exploration.esa.int/mars/54721-mawrth-vallis/http://www.esa.int/spaceinimages/Images/2016/09/Mawrth_Vallis_martian_mosaichttps://m.esa.int/spaceinimages/Images/2016/09/Mawrth_Vallis_martian_mosaicEine perspektivische Ansicht eines Teils des
Mawrth Vallis. In und um das Tal sind helle und dunkle Ablagerungen sichtbar, die auf Tonmineralien hinweisen, die in Gegenwart von Wasser gebildet wurden.
 Copyright: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO http://www.esa.int/spaceinimages/Images/2016/07/Mawrth_Vallis_perspective_view
Copyright: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO http://www.esa.int/spaceinimages/Images/2016/07/Mawrth_Vallis_perspective_viewMit den besten Grüßen
Gertrud
 Umfrage
Umfrage