Am 17. November jährt sich zum 45ten Mal die Landung von Luna 17 und damit die Anlandung von Lunochod 1 auf dem Mond.
Die Daten, die während der Lunochod-Missionen gesammelt wurden dienen auch heute noch zum Vergleich und Diskussionen mit entsprechenden Ergebnissen jüngerer oder aktueller Projekte.
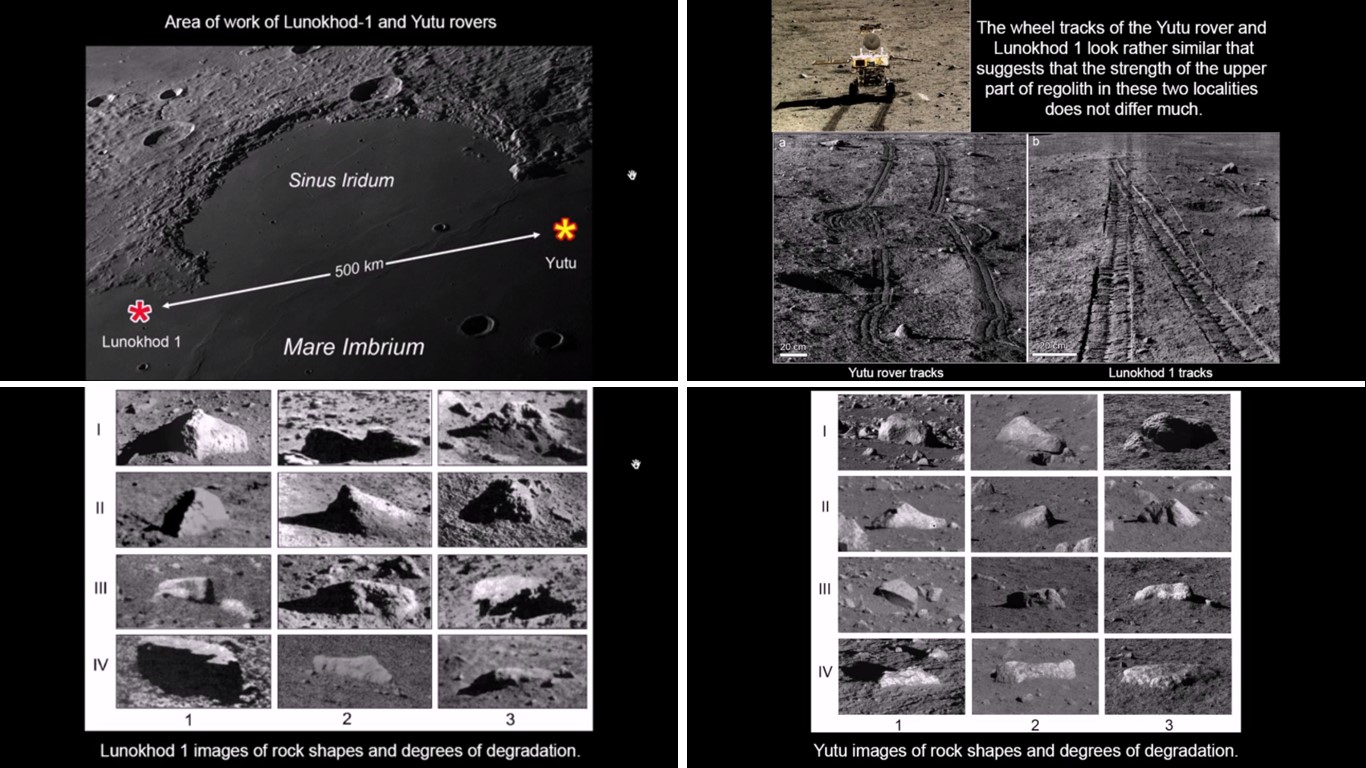
Passend dazu gab es Anfang Oktober dieses Jahres, auf dem 6. Moskauer Sonnensystem Symposium (The Sixth Moscow Solar System Symposium), einen Vortrag zum Vergleich der Daten von Lunochod 1 und Yutu, der u.a. durch Dr. Alexander Bazilevsky erarbeitet und vorgetragen wurde.
Unter dem Titel „Geologic characteristics of the Lunokhod 1 and Yutu rover landing sites“ wurden mehrere Themen hinsichtlich Gemeinsamkeiten aber auch Unterschieden erläutert.
Beginnend mit der Darstellung der jeweiligen Landestellen im Mare Imbrium über Lunochod Fahrtroute und Kraterklassifizierung, Steine an der Oberfläche, Chang’e-3 Landestelle mit Lander und Yutu-Rover, Oberflächenmerkmalen mit Fahrspurvergleichen, dem Loong Felsen, Ergebnisdiskussionen und Ausblick bis hin zu Empfehlungen für zukünftige Missionen.
Bildquelle: Youtube Video zum Vortrag
Ein Video zum Vortrag mit englischer Beschreibung:
Das Video gibt es auch mit russischer Tonspur unter dem Titel:
Геологическая характеристика СЗ части Моря Дождей в районах работы роверов Луноход-1 и Yutu
--- --- --- ---
Die entsprechenden Ergebnisse sind auch nochmal in folgendem Dokument dargestellt, wobei die Bildqualität im Video besser ist.
http://www.planetary.brown.edu/pdfs/5083.pdfDie für die o.g. Präsentation genutzten Aufnahmen wurden beim Lunochod bei Stillstand des Fahrzeugs und durch spezielle Panoramakameras mit hoher Auflösung übertragen.
Für den laufenden Fahrbetrieb des Fahrzeuges standen zur damaligen Zeit aber nur deutlich schlechtere „Livebilder“ zur Verfügung. Die Kamera- und Übertragungstechnik war da noch deutlich weniger leistungsfähig als heutzutage. Erschwerend kam hinzu, dass die Bilder bei Fahrt von einem bewegten Objekt zur Erde übertragen werden mussten, was diesen Vorgang mit geringerer Übertragungsrate weiter verlangsamte.
Bedingt durch die Signallaufzeig Mond-Erde + Erfassungs- und Reaktionszeit des Fahrers + Signallaufzeit Erde-Mond, ergab sich eine durchschnittlicher Gesamtzeitverzögerung von ca. 6 Sekunden zwischen Bild und rückwirkender Aktion auf dem Mond.. Zusammen mit der niedrigen Bildübertragungsrate war da Stress bei der Arbeit zu erwarten.
Die Front-Fahrkameras übertrugen je nach Auflösung (maximal 400 Zeilen) alle 3.2, 5.7, 10.9 oder 21.1 Sekunden ein Bild bei einer Fahrgeschwindigkeit von bis zu mehreren hundert Metern/Stunde.
Zum Vergleich der Kameratechnik: Bei der Live-Fernsehübertragung der ersten Mondladung von einem unbewegten Objekt hatte die Westinghouse Apollo Lunar Television Camera folgende Parameter
• Auflösung: 250 Zeilen (bei 10 Bildern pro Sekunde) / 500 Zeilen (bei 0,625 Bildern pro Sekunde)
Um sich die Herausforderung bildlich vorstellen zu können – mal eine entsprechende Sequenz aus dem Bodentraining Fahrzeug+Bodencrew. Die starke Sichteinschränkung, speziell bei Fahrzeugneigung im Krater wird sehr deutlich.
Die Bilder sind dem Dokumentarfilm ab ca. 25 min. entnommen, der hier schon mal Thema war.
https://forum.raumfahrer.net/index.php?topic=12187.msg275847#msg275847Da kann man sich schon einen Eindruck verschaffen wie anstrengend diese Konzentrationsarbeit am Bildschirm war.
Zur Übersichtlichkeit mal ein deutlich flüssigerer Eindruck von der Fahrt aus einer erhöhten Übersichtsposition:
Ein relativ einfach gestaltete Animation, die aber sehr gut geeignet ist, die Unebenheiten und vielen Krater auf der Wegstrecke zu erkennen, die umfahren und auch durchfahren wurden. Das Fahrzeug sicher durch diese Umgebung zu manövrieren war mit den technischen Möglichkeiten der damaligen Zeit auch eine große menschliche Leistung der Bodenoperatoren.
An einigen Stellen, wie z.B. bei 3.47 min. oder 8.26 min. sind die dazu passenden Panoramaaufnahmen eingeblendet.
Wer einfach mal Musik hören möchte – die Mondscheinsonate von Beethoven hat durchaus beruhigende Wirkung (außer in „Das indische Tuch“ mit Hans Clarin, wo er härter als Kinski ist…).
Ergänzend gibt es noch eine Präsentation zur Verarbeitung von Daten der Mondoberfläche wie im vorgenannten Video gezeigt durch die Moskauer Staatlichen Universität für Geodäsie und Kartographie (MIIGAiK)
https://www.google.de/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0CCQQFjABahUKEwi00dWh0JDJAhVFNxQKHZ3XCLU&url=https%3A%2F%2Fissues.cosmos.esa.int%2Fpsawiki%2Fdownload%2Fattachments%2F3342712%2FS1_1500_Karachevtseva_PROGIS2.0_MExLab.pdf%3Fversion%3D1%26modificationDate%3D1432633783000%26api%3Dv2&usg=AFQjCNGV6yguuV6SktqTXbSIsVv2jK7Hlg&cad=rjaEs gibt schon einige Zeit auch Kontakte und Zusammenarbeit mit dem DLR – Institut für Planetenforschung Berlin.
Eine allgemeine Präsentation über die ersten Projekte, Räumlichkeiten und Lage, sowie Arbeit des Laborteams für Geodäsie und Kartographie am MIIGAiK und Kooperationen ist hier zu sehen.
http://www.iki.rssi.ru/conf/2012oct4/oberst.pdfdksk