Hallo Zusammen,
Nach einigen sehr produktiven Wochen beenden die Wissenschaftler die Arbeit bei der Bohrstelle
„Stoer“. Sie machten noch einige ChemCam- und Mastcam-Beobachtungen des ausgeschütteten Bohrmaterials.
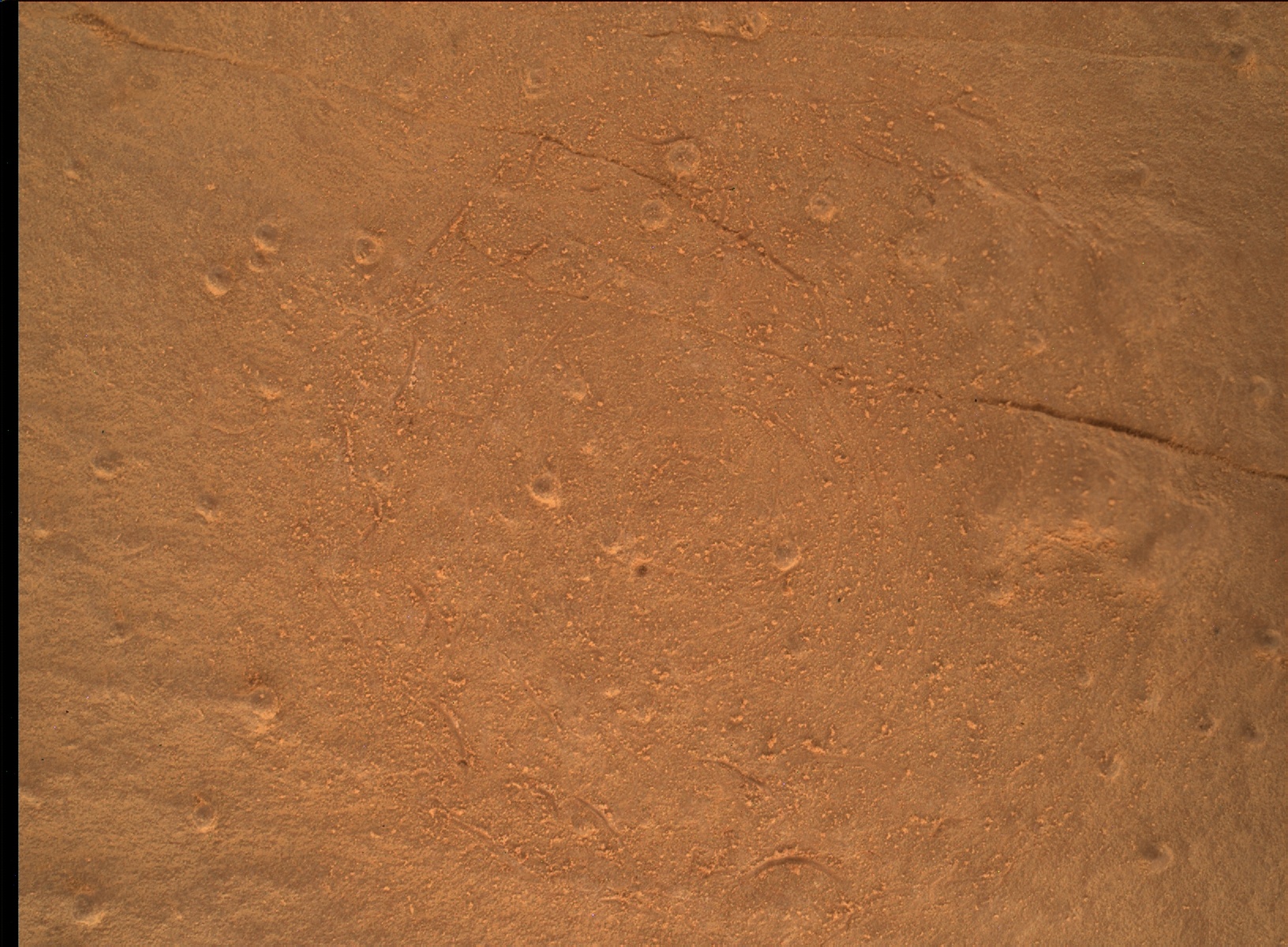
Die Aufnahme an Sol 2155, den 29.08.2018 mit der MAHLI.
 http://mars.jpl.nasa.gov/msl/multimedia/raw/?rawid=2155MH0004240010802750C00_DXXX&s=2155
http://mars.jpl.nasa.gov/msl/multimedia/raw/?rawid=2155MH0004240010802750C00_DXXX&s=2155Da Curiosity jetzt die Bohrstelle
„Stoer“ verlässt, hat
Abigail Fraeman einen Bericht darüber geschrieben, warum die Wissenschaftler an diesen bestimmten Ort gebohrt haben. Die Forscher hatten ja zuerst versucht, auf
Vera Rubin Ridge an Sol 2112 beim Ziel
"Voyageurs" zu bohren.
Der Bohrer machte jedoch nur wenige Millimeter Tiefe in diesem Ziel, bevor er anhielt, weil die Geschwindigkeit des Abwärtsfortschritts so langsam war. An Sol 2114, den 18.07.2018 mit dem Remote Micro-Imager(RMI) aufgenommen.
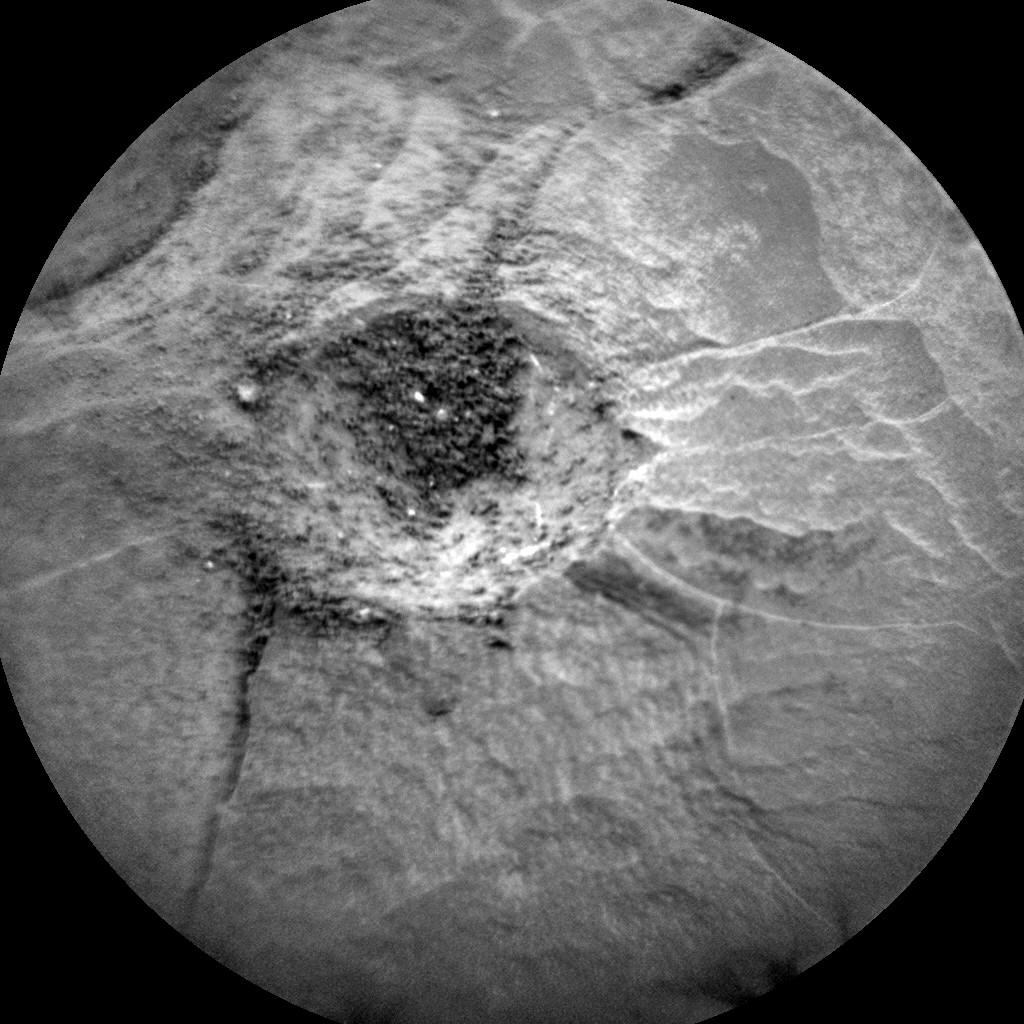
Der Bohrer selbst hat gut funktioniert, aber der
„Voyageurs“ Felsen war einfach zu hart. Es war aus wissenschaftlicher Sicht ziemlich interessant, dieses Ergebnis zu sehen, aber es bedeutete auch, dass das Team schnell arbeiten musste, um einen Plan B zu finden.
Das Wissenschaftsteam stimmte zu, dass es wissenschaftlich wichtig genug sei, es nochmal zu versuchen eine Bohrprobe aus dem unteren Teil von
Vera Rubin Ridge zu bekommen. Aber wie konnten sie ihre Chancen verbessern, einen Stein zu finden, der weicher und einfacher als
„Voyageurs" zu bohren ist.
Es war Zeit, wie Geologen zu denken. In Ermangelung direkter Daten über die mechanischen Eigenschaften des Gesteins hat das Team drei Kriterien gefunden, mit denen sie versuchen konnten, ein weicheres Gestein zu finden.
1) Haben die Borsten der DRT-Bürste Kratzer auf den Oberflächen der Steine hinterlassen?
Obwohl nicht unbedingt ein direkter Hinweis darauf war, wie hoch die Gesteinsstärke sein würde, wenn Curiosity darin bohren würde, könnte das Team zumindest sagen, dass Gesteine, die mit dem DRT gekratzt wurden, eine weichere Oberfläche hatten als solche, die keine Spuren von der Büste aufwiesen.
2) Wie gut sind die weißen
Calciumsulfat-Adern exponiert?
Auf einigen Felszielen, wie
"Stoer", waren die Adern deutlich sichtbar. Bei anderen Zielen, wie
"Voyageurs", sind die Adern in die Felsen eingelassen. Vertiefte Adern erodieren viel schneller als das umgebende Grundgestein, da das umgebende Grundgestein härter ist. Nicht vertiefte Adern sagen den Geologen, dass das Grundgestein in der Stärke den Adern ähnlich sein kann, oder wenn die Adern herausragen, kann das Grundgestein eine geringere Festigkeit aufweisen.
3) Was sagt die großräumige Topographie aus?
Im Großen und Ganzen ist der
Vera Rubin Ridge ein Grat, der aus hartem Gestein besteht, das gegen Erosion widerstandsfähiger als seine Umgebung ist. Das Team erkannte, dass sie dieselbe Logik verwenden konnten, um weichere Felsen innerhalb des Bergrückens zu finden, indem sie versuchen, auf lokale topographische Tiefen zu bohren oder an Basen von Verwerfungen, wo der Grund der Verwerfung schneller erodierte als die harten Felsen an der Spitze.
Das Team hatten bereits viel von
Vera Rubin Ridge erkundet, sie hatten so bereits viele Daten, um nach den nächsten Bohrzielen zu suchen. Mehrere Mitglieder des Wissenschaftsteams gingen schnell alle Bilder durch, die Curiosity in den letzten 200 Sols gemacht hatte. Sie fanden nur eine Handvoll Kandidaten, die den Kriterien entsprachen. Das Gebiet in der Nähe von
"Ailsa Craig" war in der Nähe von „Voyageurs“ und sah so unterschiedlich aus, dass sie dachten, dass sich eine Bohrung lohnen würde. Sie haben beim Bohren in dieses Ziel mehr Fortschritte gemacht als bei
„Voyageurs," aber immer noch nicht genug.
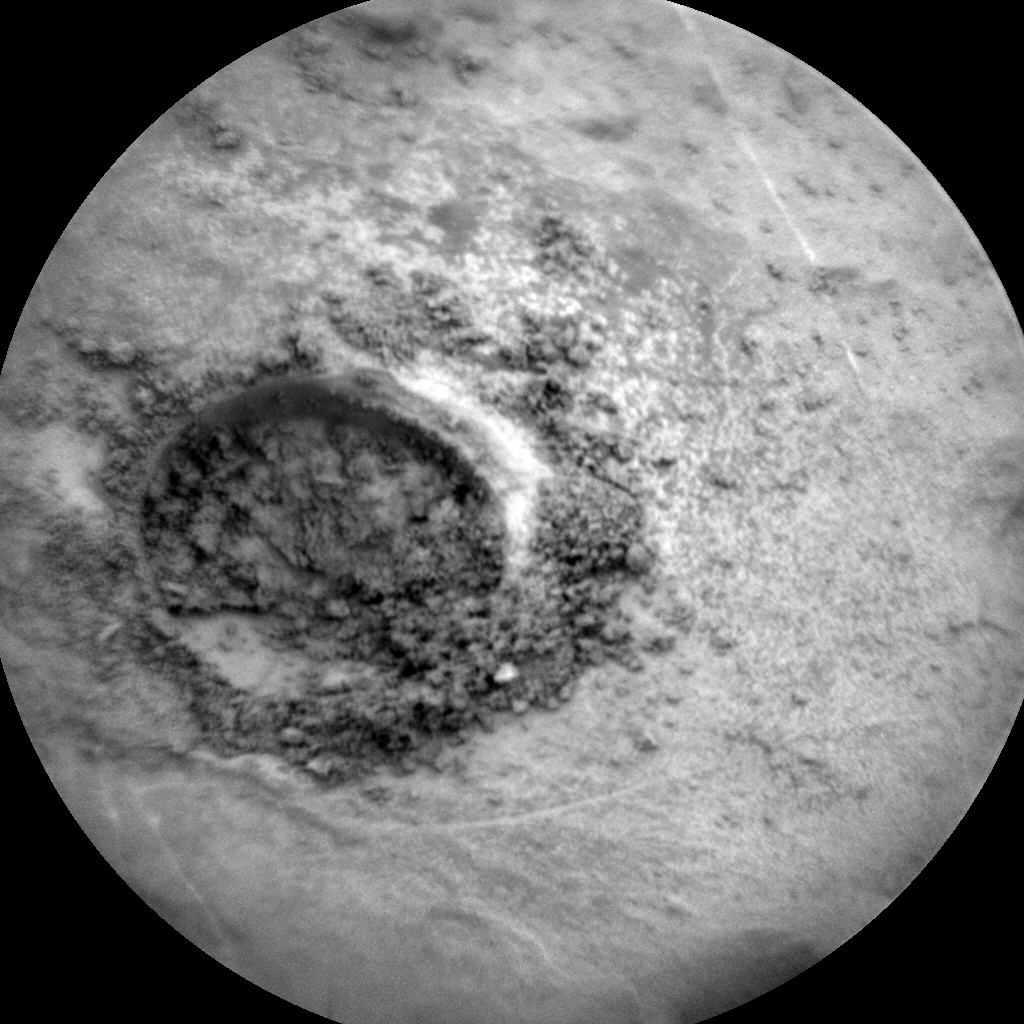
Von Sol 2123, den 27.07.2018, eine Aufnahme von der Bohrung in
"Ailsa Craig".
Das Ziel
"Stoer" war die letzte Wahl, und es wurde gewählt, weil es in der Nähe der Basis einer Steilwand war und mehr prominent ausgedrückte Adern hatte. Sie hatten alle ein sehr gutes Gefühl für dieses Ziel, besonders nachdem sie an Sol 2134, den 7.08.2018, sahen, dass die Bürste die Oberfläche gekratzt hatte.
Das Team waren von dem erfolgreichen Bohrloch begeistert.

Das Team hatte so hart gearbeitet, um diesen weniger harten Stein zu finden, so das diese gemeinsame Arbeit bei
„Stoer“ zurückblickend ein Höhepunkt ist. Curiosity wird die Hügel hinauf fahren und bewegt sich in Richtung der nächsten Bohrstelle.
Quelle:
https://mars.jpl.nasa.gov/msl/mission/mars-rover-curiosity-mission-updates/?mu=sol-2156-the-story-of-stoerMit den besten Grüßen
Gertrud