Ganz vergessen, es kam ja eine schnelle Antwort: Das "plötzliche Verhalten" ist ein Filterartefakt im Katalog, wenn neue, veränderte Beobachtungsdaten "eingeflochten" werden.
Whow, das ist interessant. Danke für die Info.
Das NORAD filtert die Daten also Extrem. Ich konnte einen Filter nachstellen, welcher ein sehr ähnliches Ergebnis liefert.
Details:
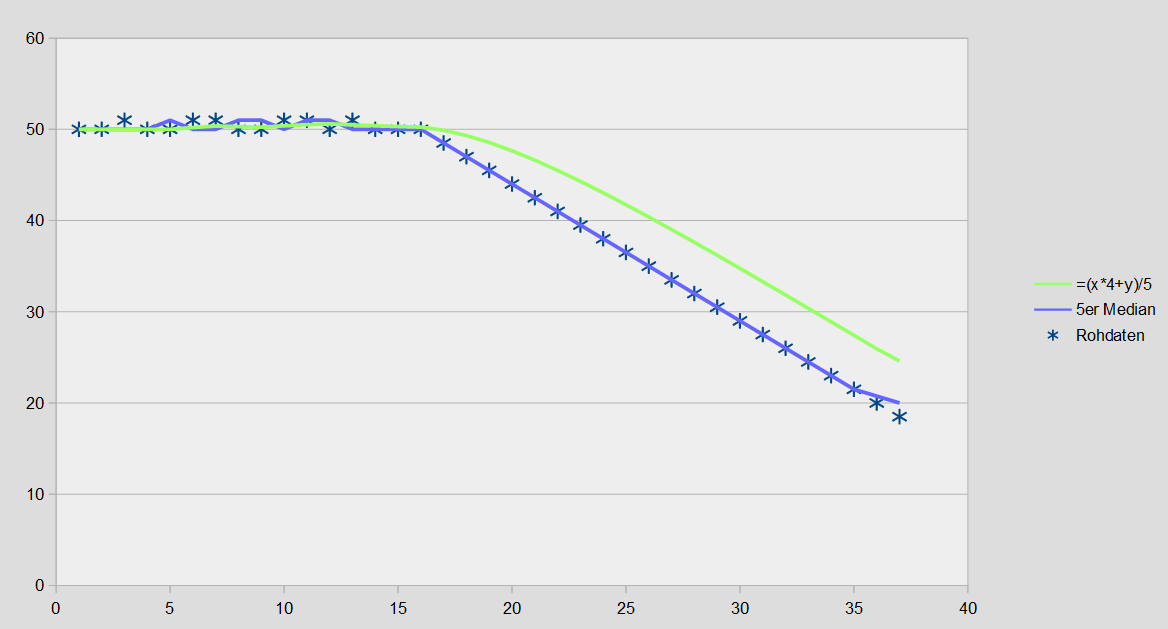
Wenn eine Umlaufbahn instabil ist, dann möchte ich möglichst schnell möglichst gute Messwert haben. Da man aber nie weiß, ob die Umlaufbahn gerade schneller oder langsamer sinkt, oder ob man einen Messfehler hat, sollte man auch gut Filtern. Hier ist ein Median über die 5 Messwerte sehr gut. Er filtert mir bis zu 2 Messfehler in 5 Rohdaten in die gleiche Richtung weg. Damit bekomme ich gute Daten zum weiter arbeiten, welche mir auch gute Werte liefern. Der große Nachteil: Ich habe den gefilterten Wert erst immer mit 2 Messungen zeit-verzögert. Wenn ich nicht weiß, ob mein neuster Messwert richtig oder falsch ist, dann ist das jedoch ein guter Kompromiss. In der Grafik die blaue Linie.
Wenn ich jedoch eine stabile Umlaufbahn habe, dann möchte ich nicht immer 2 Messwerte abwarten. Da ich weiß, daß meine Umlaufbahn stabil ist, kann ich mein Radar genauer ausrichten und habe viel weniger Messfehler. Hier wäre ein Formel in folgender Art sehr gut: "Neuer Wert = ( Alter Wert *4 + 3erMedian) /5". Der 3erMedian geht jetzt über drei Messwerte. Damit bin ich nicht mehr 2 Messungen hinterher, sondern nur eine Messung. Und mein Wert ist viel stabiler und ruhiger. Ich habe also die besseren Messwerte. Aber ich kann Veränderungen viel schlechter darstellen. In der Grafik ist das die grüne Linie.
Man sieht bei der Stabilen Umlaufbahn von 50 km Höhe wie ruhig die grüne Linie ist und wie unruhig die blaue Linie ist. Grün ist besser. Und man sieht, wie zeitverzögert die grüne beim sinken der Umlaufbahn ist, während die blaue Linie viel besser ist.
Jetzt muss eine Software nur erkennen, ob eine Bahn gerade "Stabil" oder "Instabil" ist, und entsprechend umschalten. Ich habe das hier recht einfach gemacht, wenn der Messwert mehr als 3% abweichend ist, ist es instabil, sonst stabil. Da geht natürlich viel mehr, aber das ist hier zum Testen nicht notwendig.
Ergebnis: Ich habe die dicke rote Linie genau so, wie sie hier vorhanden ist.
Das wichtige Fazit an der Sache: Die NORAD-Daten sind immer unterschiedlich gefiltert. Wir User können auf die schnelle nicht erkennen, welcher der beiden Filter gerade läuft. Wir wissen somit nicht, ob die Daten gerade mehr Rauschen und aktueller sind oder ob sie sehr stabil sind weil der Filter gerade dafür sorgt.
 https://www.dropbox.com/s/d6jb72ap3n97s7z/Filter%201.PNG?dl=0
https://www.dropbox.com/s/d6jb72ap3n97s7z/Filter%201.PNG?dl=0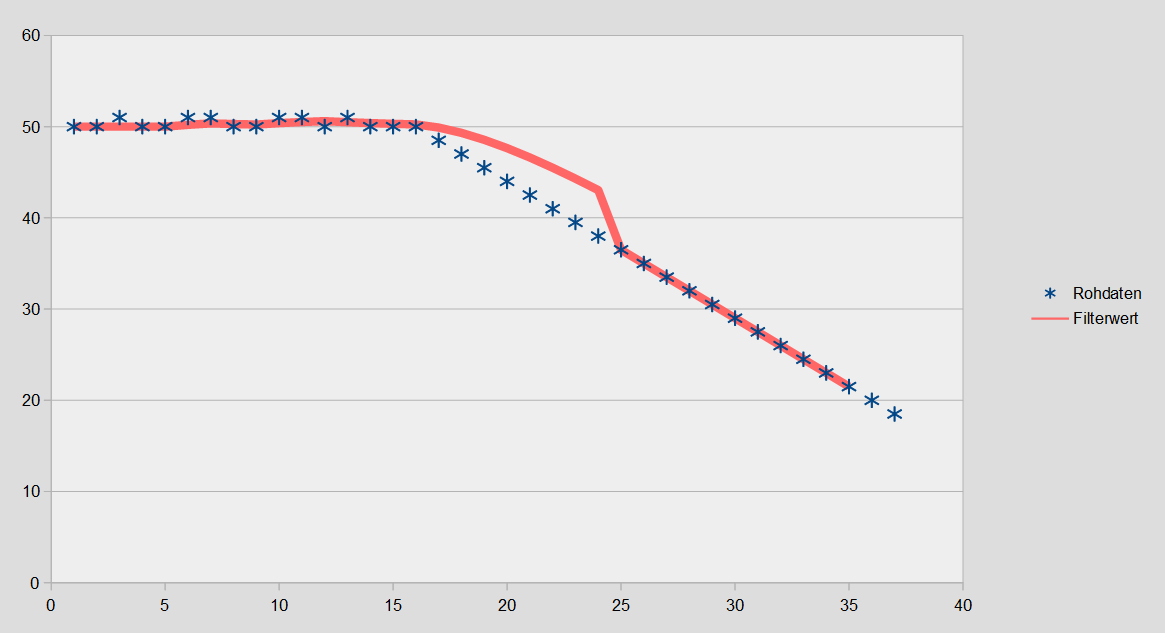 https://www.dropbox.com/s/a4v9dtlgmcn1221/Filter%202.PNG?dl=0
https://www.dropbox.com/s/a4v9dtlgmcn1221/Filter%202.PNG?dl=0