CMSA entwickelt einen Taikobot (2)Durch die CMSA wurde im März 23 ein Robotermodell mit dem Namen Taikobot vorgestellt, das für den Einsatz auf der Raumstation CSS einsetzbar sein könnte.
Da ich zwischen Okt. 22 bis Mai 23 keine weiteren Bilder einstellen konnte, will ich das nun nachholen.
Im ersten Beitrag sind die ersten Tests und die Frontal-Ansicht mit dem Gelenk-und Achsen Schema zu sehen (
s. dort)
Der Arbeitsbereich des Taikobot Das Doppelarmsystem von Taikobot ist so ausgelegt, dass er mit beiden Armen verschiedene Arbeiten durchführen kann und sich bei der Fortbewegung in der jeweiligen Kabine der CSS in der Schwerelosigkeit damit abstützen kann. Dazu befinden sich die ersten drei Gelenke in der Schulter so ähnlich wie bei einem menschlichen Arm und erlauben das Schwenken, das Abspreizen und das Drehen. Die übrigen drei Gelenke im Ellenbogen und Handgelenk haben eine ähnliche Konfiguration. Der Arm ermöglicht es dem Roboter mit seinen 6-DOF(Freien Achsen) ermöglicht es dem Roboter, Objekte in jeder beliebigen Stellung im Arbeitsbereich sicher zu handhaben.
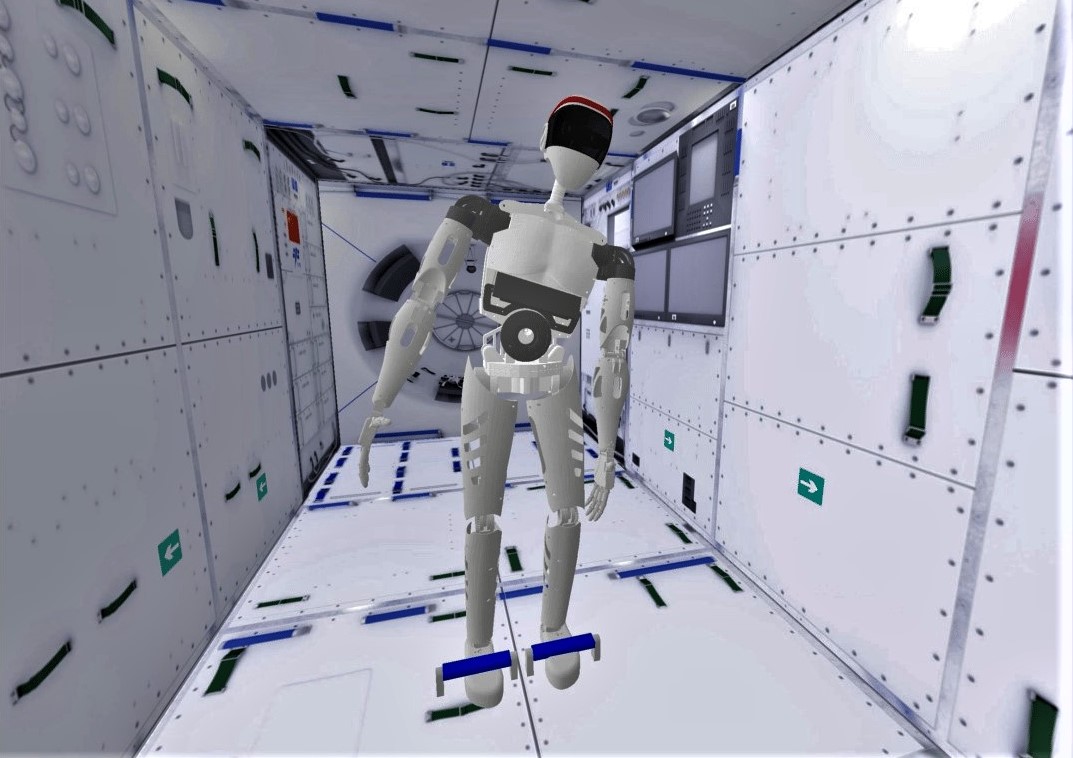
Unter der Bedingung der Schwerelosigkeit ist der Taikobot in der Lage dadurch dass er in der Raumstation die vorhandenen Handläufe zu greifen und sich so auch selbst festzuhalten. Genauso kann der mit den glatten Fußsohlen gut stehen und mit den "Schuhen" in die Halteschlaufen an allen 4 Wänden schlüpfen und sich fixieren.
Er hat eine relativ große Armspannweite (1,92 m), damit er an Bord sich leichter sichern kann.
Der Arbeitsbereich des Doppelarmsystems des Taikobot deckt fast den gesamten Arbeitsraum ab, bis auf einen toten Bereichen auf seiner Rückenseite.
Durch zwei zusätzliche Gelenke in der Taille konnte der Arbeitsbereich des Taikobot aber auch etwas vergrößert werden.
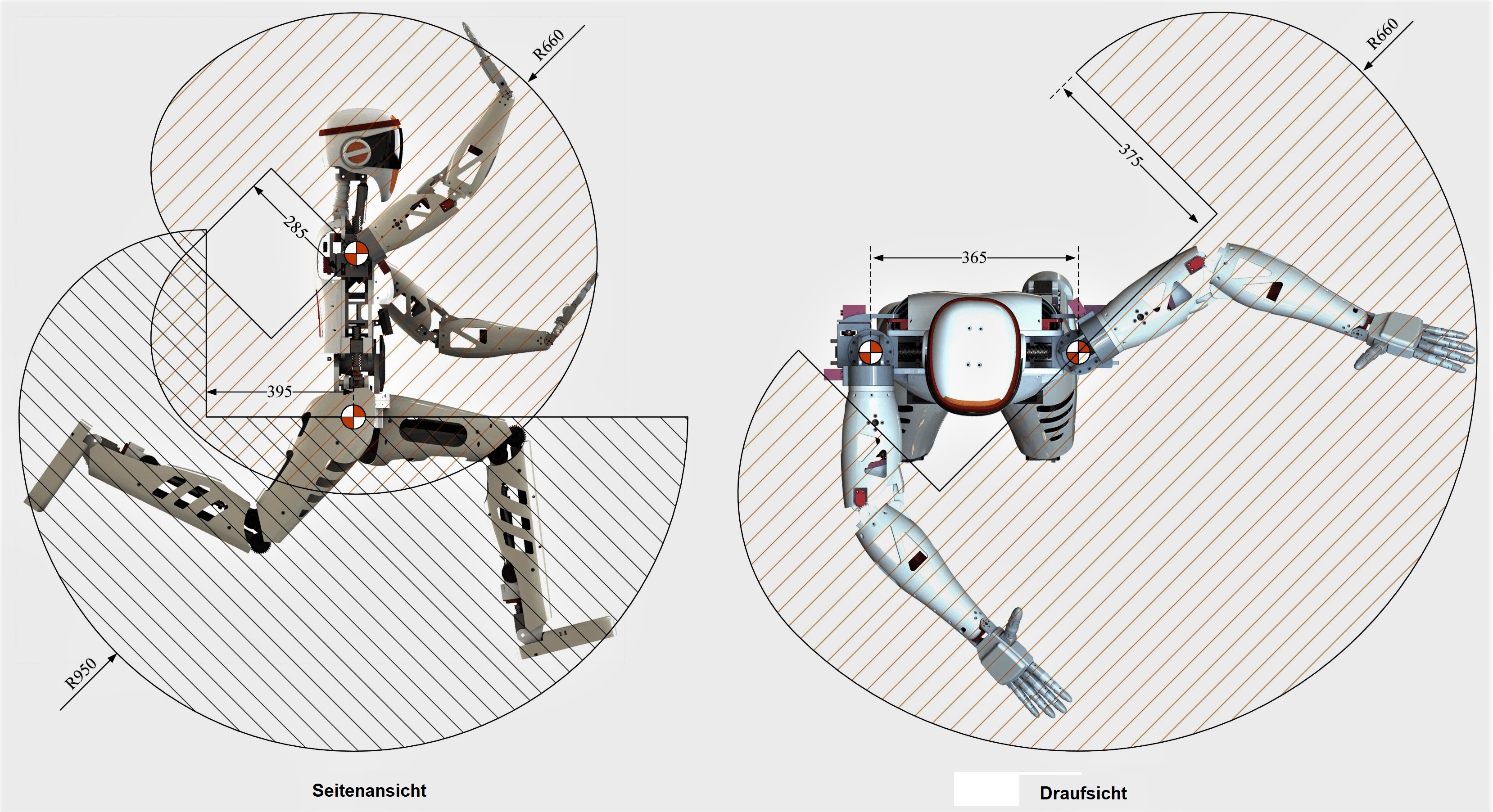
Der Arbeitsbereich des Taikobot in Seitenansicht und in Draufsicht Bild: CMSA/CNSF/weibo.cn/ed.HausD
Wie im ersten Beitrag schon beschrieben, wird die Fortbewegung von Taikobot hauptsächlich durch die Nutzung der Reaktionskräfte zwischen seinen Gliedmaßen und den Innenwänden mit der
Push
Flight
Park -Strategie erreicht.
Push-Flight-Park - Abstoßen von einer Wand - Fliegen - Erreichen des Ziels - so wie es die Taikonauten auch tun.
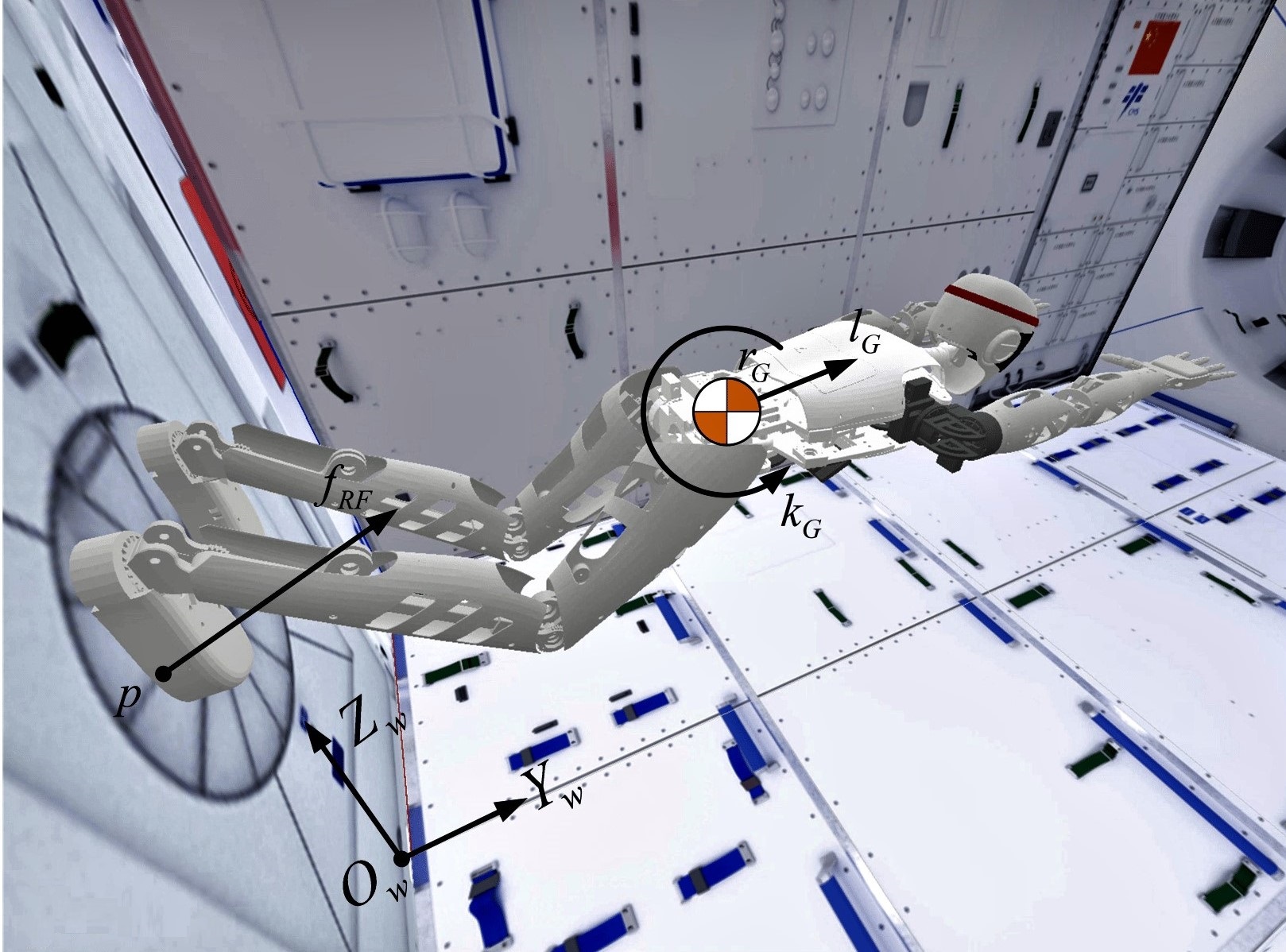
Abstoßen ... fliegen ... Bild : CMSA/CNSF/weibo.cn/ed.HausD
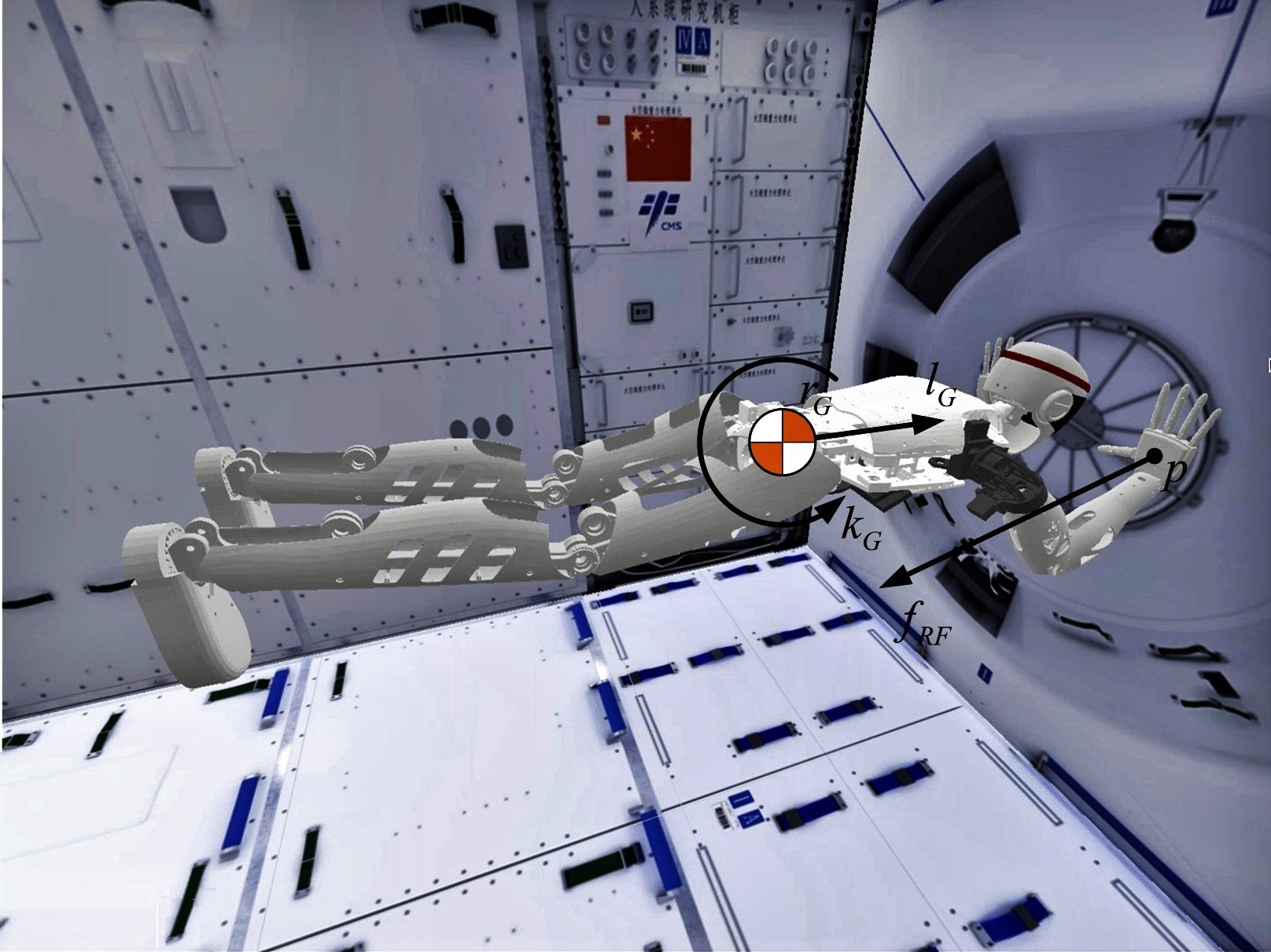
... fliegen ... am Ziel ankommen Bild : CMSA/CNSF/weibo.cn/ed.HausD
Flug mit Haltegriff ... Bild : CMSA/CNSF/weibo.cn/ed.HausD
Die Füße des Taikobot sind verankert Bild : CMSA/CNSF/weibo.cn/ed.HausD
Gruß, HausD