Wie herum war es denn jetzt wirklich: Wheel-Walking als Nebeneffekt des Deployments oder Deployment als Nebeneffekt des Wheel-Walkings? 
Eine eineindeutige Antwort wie es „wirklich“ war, lässt sich hier im Forum eher nicht abschließend geben.
Liegen doch die Grundlagen der Auslegung und die dazugehörigen Entscheidungen teilweise weit über 10 Jahre zurück und wir können „nur“ aufbereitete Veröffentlichungen als Quellen nutzen, die den unterschiedlichsten Berichtszwecken dien(t)en. Daher wird es wohl weiter im Diskussionsformat voran gehen.
Mal meine Sicht der Dinge:
Die Entscheidung einen Entfalte- (Deployment )mechanismus für die Räder/Aufhängungen einzusetzen sehe ich von Anfang an gesetzt. Dafür spricht die Möglichkeit den Rover in Transportstellung sehr kompakt zu gestalten mit entsprechend optimaler Raumausnutzung beim Abstiegsmodul.
Die danach folgende Entscheidung „Einwegsystem oder Mehrfachaktuator“ für die Radentfaltung wird wohl auf Grundlage eines Vor/Nachteilvergleichs gefallen sein. Das ist aus meiner Sicht die interessante Frage.
Bei Einwegsystem als Stichwort: Mechanik und beim Mehrfachaktuator als Stichwort Mechatronik.
Mechatronik hat bei bestimmten Anwendungen nun mal Vorteile gegenüber Mechanik. Die Kombination mit Sensorik und anpassbarer Software kann für den funktionellen Betrieb das Nutzungsspektrum unheimlich erweitern. Die potentielle nachträgliche Anpassung via Softwareupdate kann sogar bei Problemen eine Rettungsmöglichkeit darstellen.
Daher denke ich, dass hier die Grundentscheidung erst mal über die motorische/mechatronische Lösung gegangen ist und auf dieser Entscheidungsbasis dann sehr viele Detailanwendungen bezüglich Fahrwerkssteuerung nach und nach hinzugekommen sind.
Manch eine Idee wird nach der Erprobung im Sandkasten sicher auch verworfen worden – oder dort erst entstanden und hinzugekommen sein.
Der Umstand, dass die Mission mehrfach verschoben wurde und damit auch die Zwischenzeit sinnvoll genutzt wurde hat wohl auch zu weiteren „Verfeinerungen“ geführt.
--- --- --- --- ---- --- --- ---
----- Gedankenschwenk -----
Um die Mechatronik optimal zu nutzen wird eine enstprechende Steuerung, Elektronik, Systeme etc. benötigt:
Die Fahrwerkssteuerung des Rovers besteht aus mehreren Komponenten.
z.B. Rover Bogie Motor Controller
Damit werden die Motoren jedes Bogie „Beins“ gesteuert. Die entsprechenden Systemanforderungen Soft- und Hardware werden hier beschrieben:
http://robotics.estec.esa.int/ASTRA/Astra2011/Papers/02A/FCXNL-11A06-2141876-5-2141876Lee_Paper_WithCorrectedTypo.pdfZum Fahren nutzt der Rover eine entsprechende Funktionsarchitektur bei der Signal Input/Output und die jeweiligen logischen Verknüpfungen bzw. Zuweisungen festgelegt sind.
Hier ein Prinzipschaltbild davon:
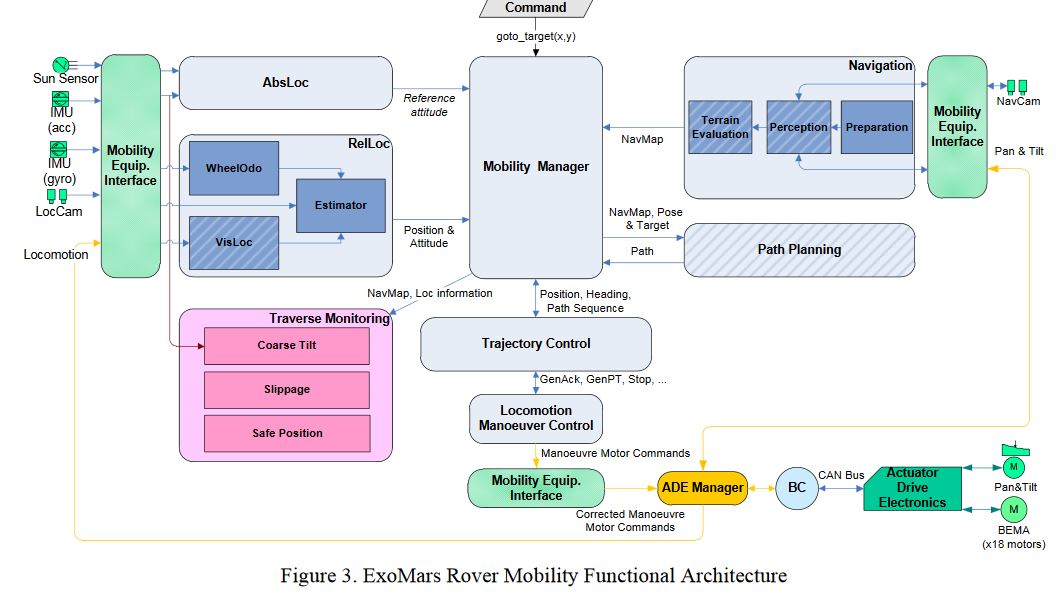
Untern auf der rechten Seite sind die 18 Motoren des Fahrwerks (BEMA) dargestellt.
Bildquelle und Dokumentenlink:
http://robotics.estec.esa.int/ASTRA/Astra2013/Papers/silva_2811301.pdfBei der Beschreibung wird klar, dass beim Fahren des Rovers auch sehr viele Parameter in die Streckenvorbereitung und Überprüfung einfließen, die die Grundlage für die „Entschlussfassung“ vor Ort sind, um das gewünschte Fahrziel sicher zu erreichen. Die Grundlage der Navigaton vor Ort ist jeweils die sichere Strecke, sodass das Fahrwerk eher nicht in die Extremleistung kommen sollte.
Direkt vor den 18 Motoren im obigen Prinzipschaltbild ist die „Actuator Drive Electronic“ zu erkennen.
Sie ist für die Aktivierung und Überwachung aller externen Antriebe des Rovers zuständig.
u.a.: Solarzellenantrieb, Freigabe und Verriegelungsmechanismen, Kamera und Gerätemast; Bogie Electro Mechanical Assembly (BEMA)
Die BEMA Antriebe hier nochmal im Detail bildlich dargestellt:
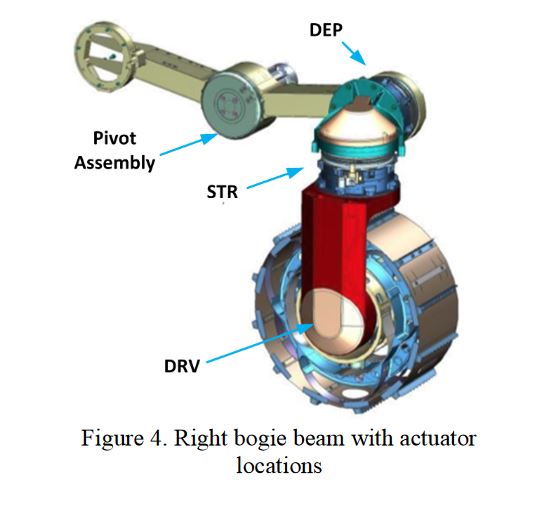
Pivot Assembly – Drehpunkt der Radaufhängung
DEP – Deployment /Entfalteantrieb
STR – Steering / Steuerungsantrieb
DRF – Drive / Fahrantrieb
Bildquelle und Dokumentenlink mit weiterführenden Detailinfos:
http://robotics.estec.esa.int/ASTRA/Astra2015/Papers/Session%201A/96038_Poulakis.pdfdksk
 Umfrage
Umfrage