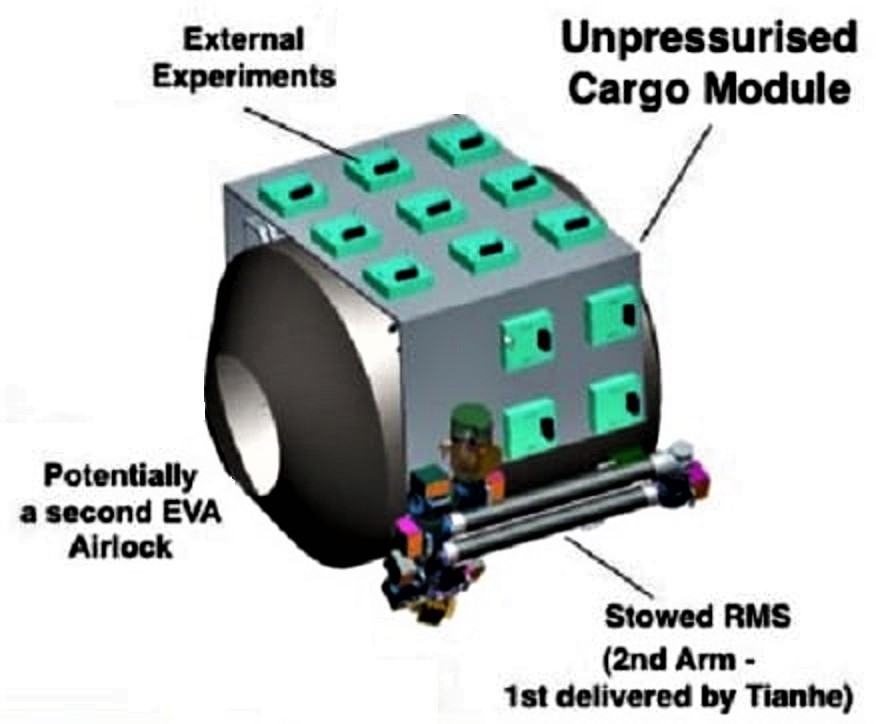
Lieferung und Montage eines kurzen Rob.-Arms ( 3 )Auf dem Wentian-Modul, der zur CSS Tiangong geliefert wurde, befand sich ein noch wenig beachteter Roboterarm.
Dieser Arm ist zum seitlichen Drehen der Labormodule nach dem Anlegen an die CSS vorgesehen.
Arm zum seitlichen Drehen der Labormodule
Bild: CMS/CNSpaceDieser Arm wird auch als "Pfote" (nach dem russ. Vorbild "Ljappa") genannt und stellt nach unserem menschlichen Vorbild dar:
einen Ellenbogen - einen Unterarm - ein Handgelenk - und eine Hand (Greifer).
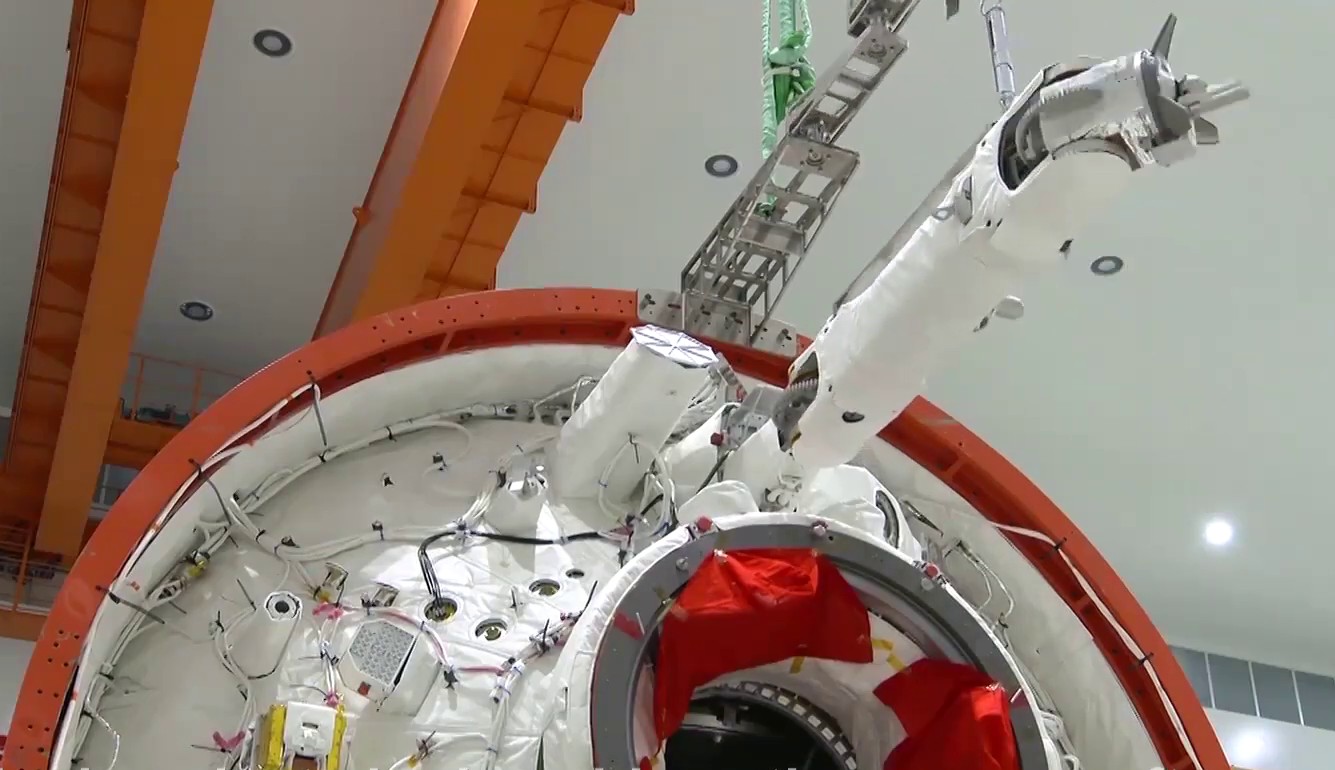
Am Wentian befand sich aber ein noch viel weniger beachteter Roboterarm mit einer Gesamtlänge von 5 m, der mir erst aufgefallen ist, als ich mir dieses Bild genauer angesehen habe:

Der lange mit dem kurzen Arm in Aktion
Bild: CMS/CNSpaceIn diesem Bild erkannte ich noch einen Arm neben den beiden langen Armstücken, der senkrecht auf die Mittelachse von TH+Knoten+
⇓ WenTian zeigt ...
Das Nachsuchen nach dem kurzen, eigentlich mittellangen Roboter-Arm auf der CSS hat dann Klarheit gebracht.
Der mittellange Roboterarm, der auf diesem Wentian-Labormodul Teil angebracht war und zur CSS geliefert wurde.
Der mittellange Arm, zusammengeklappt
Bild: CMS/CNSpaceNun die Roboter-Arme auf der CSS:
Der lange Arm ist schon mit dem Tianhe geliefert worden und schon länger inbetrieb.
... nun von Wentian mitgebracht :
Der kurze Arm "Lyappa" neben dem Koppelstutzen von Wentian.
Der mittellange Arm (als Verlängerung der Langen Arms) zusammengeklappt auf dem Experimentierteil von Wentian.
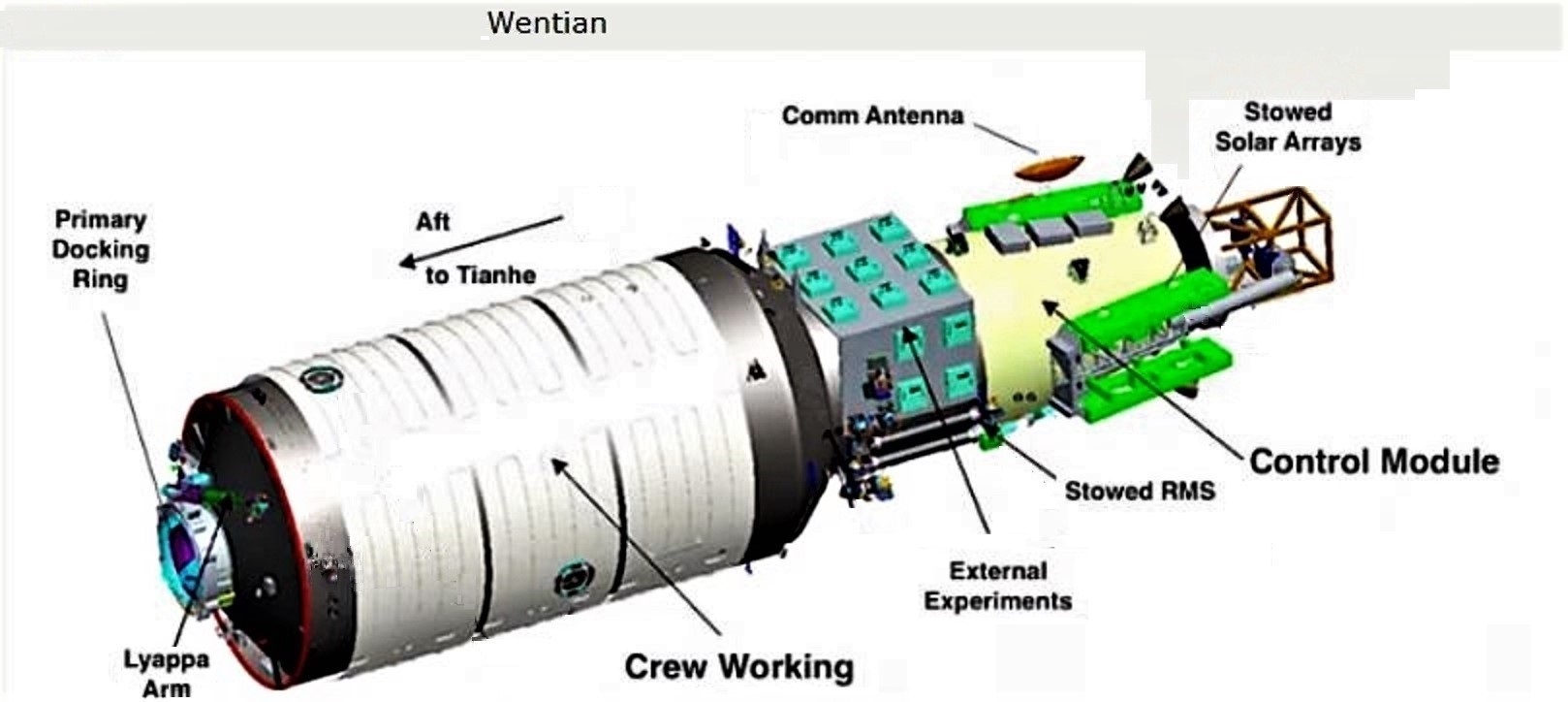
Kurzer Arm "Lyappa" ----- Mittellanger Arm
Bild: CMS/CNSpaceGruß, HausD