Ich habe ein Dokument für eine Variante eines Mond-Probenentnahmesystems gefunden.
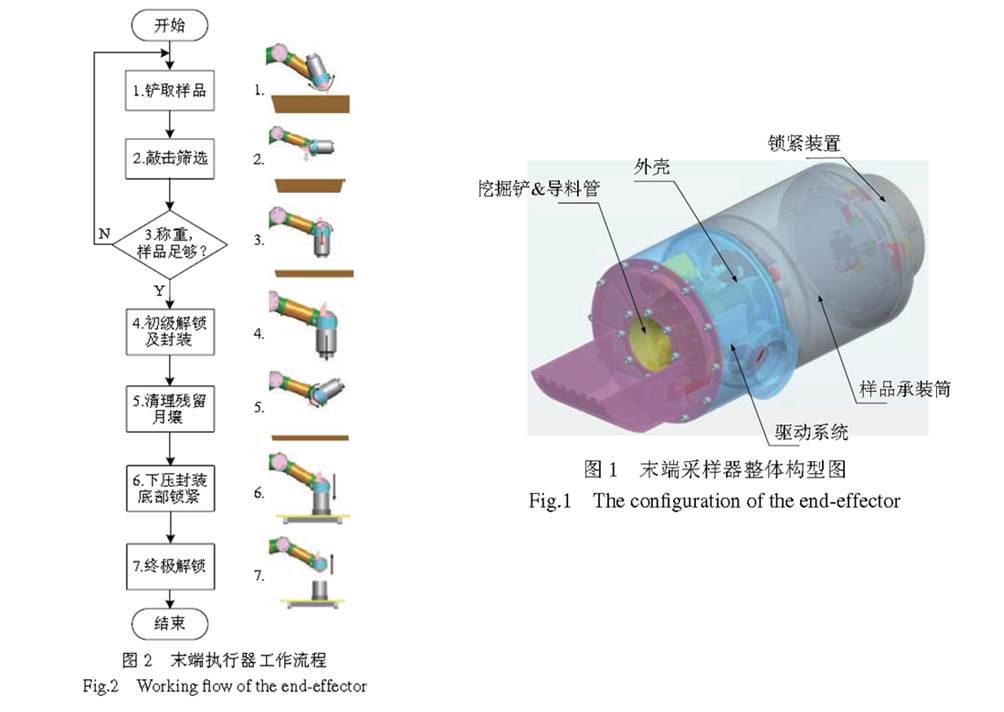
LINKEs wird ein Endeffektor beschrieben, der aus Schaufel, Trichter/Rüttelsystem, Container und Verschluß/Trennmechanismus besteht.
Es sind Schnittstellen zu einem Roboterarm und einer Containerfixierung vorhanden.
 Bildquelle entsprechend LINK oben:
Bildquelle entsprechend LINK oben:
Harbin Institute of Technology, Harbin 150080, China
DOI:10.3724/SP.J.1218.2013.00009
Seite 2 “A Novel End-Effector for Lunar Sample Acquisition and Return” Die Funktionen zum Sammeln der Proben und deren Einfüllung und Verschluß im Container sind im Endeffektor zusammengefaßt. Damit kann ein komplett gefüllter und verschlossener Container zur Rückkehreinheit übergeben werden.
Die internen Abläufe und Bewegungen sind hauptsächlich auf Drehbewegungen basierend. Dazu gehören ein Rüttelsystem und Verschlüsse.
Die externen Bewegungen müssen über einen Befestigungsflansch von einem Roboterarm/Manipulator ausgeführt werden. Dieser Roboterarm ist im Dokument nur als Laborexemplar mit 4 Freiheitsgraden für die Funktionstests dargestellt. Für die Landeeinheit ist hier auch eine andere Ausführung denkbar.
Je nach Schwenkstellung des Endeffektors kann gegraben/geschoben werden bzw. durch Drehung die Proben in den Container gefüllt werden.
Um die Füllung unter den Bedingungen auf dem Mond zu erleichtern wird mit einem Rüttelsystem nachgeholfen. Dadurch könnte auch am Container außen anhaftender Mondstaub abgeschüttelt werden.
Nach Beendigung der Containerbefüllung kann der Endeffektor gedreht und abgesetzt werden.
Beim Aufsetzen auf eine definierte Schnittstelle wird der vordere Teil abgetrennt , der Container mit der Absetzposition fixiert und der Roboterarm weggeschwenkt.
Damit ergibt sich die Option einer direkten Übergabe zur Rückkehreinheit oder über eine Zwischenpositionierung.
dksk