Hallo Zusammen,
die
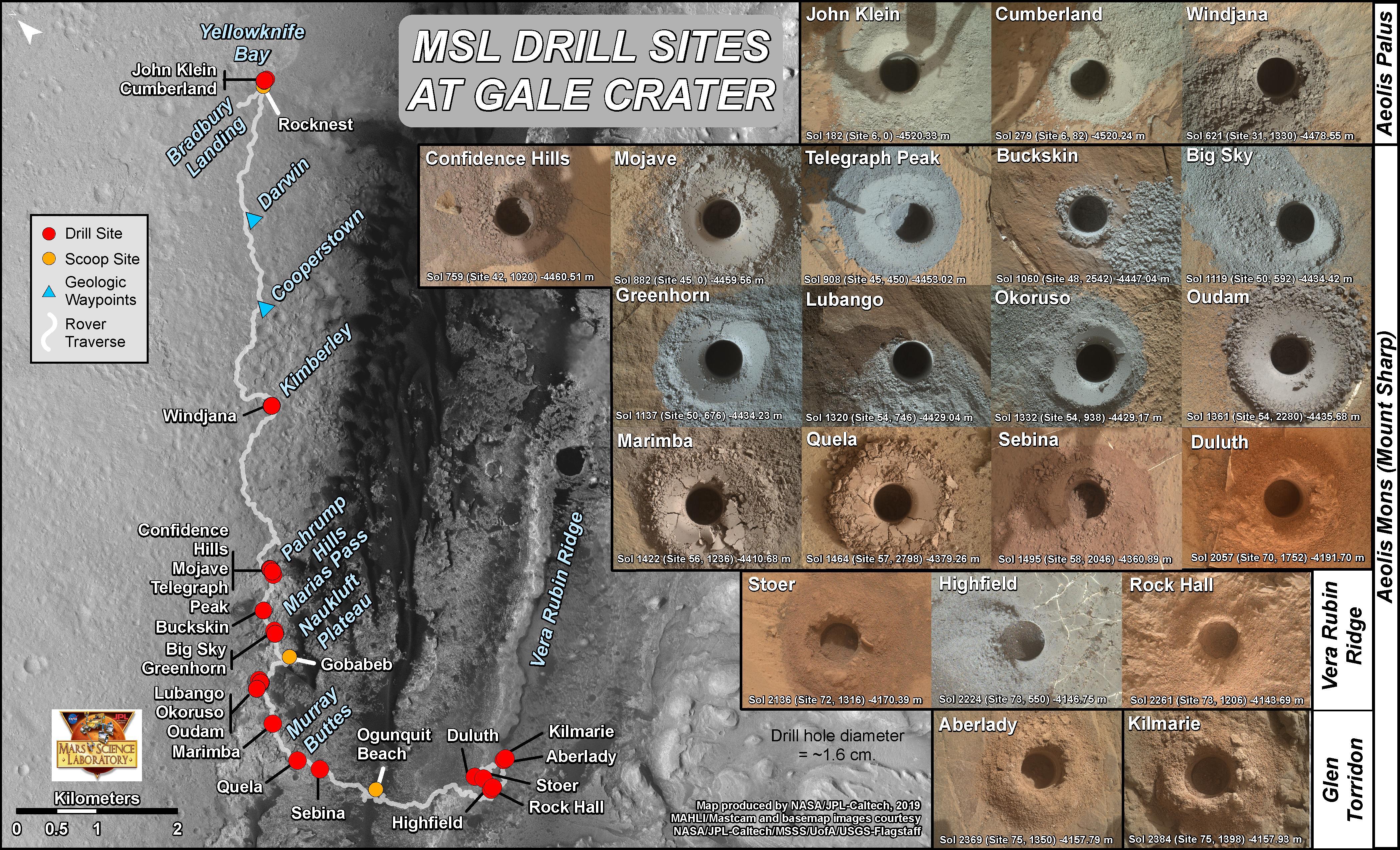
21 Bohrlöcher von Curiosity auf dem Mars.
Diese Grafik zeigt Standorte an denen Curiosity die Gesteins- und Bodenproben zur Analyse durch Laborinstrumente im Fahrzeug gesammelt hat. Es zeigt auch Bilder der Bohrlöcher, in denen 21 Gesteinspulverproben gewonnen wurden.
Der Durchmesser jedes Bohrlochs beträgt etwa 1,6 cm und ist etwas kleiner als ein US-Cent. Die hier verwendeten Bilder sind Rohfarben, die mit der
Mars Hand Lens Imager (MAHLI) des Rovers aufgenommen wurden. Die Farbunterschiede des Materials an den verschiedenen Bohrstellen ist gut zu sehen.

Für die Karte ist Norden in Richtung der oberen linken Ecke. Der Maßstabsbalken entspricht 2 Kilometern. Die Basiskarte stammt von der
HiRISE (High Resolution Imaging Science Experiment) auf dem
Mars Reconnaissance Orbiter (MRO) der NASA.
 Kredit: NASA/JPL-Caltech/MSSS/Univ. of Arizonahttps://photojournal.jpl.nasa.gov/catalog/PIA23413
Kredit: NASA/JPL-Caltech/MSSS/Univ. of Arizonahttps://photojournal.jpl.nasa.gov/catalog/PIA23413Leider fehlt das 22. Bohrloch
"Glen Etive" von Sol 2486, den 4.08.2019.
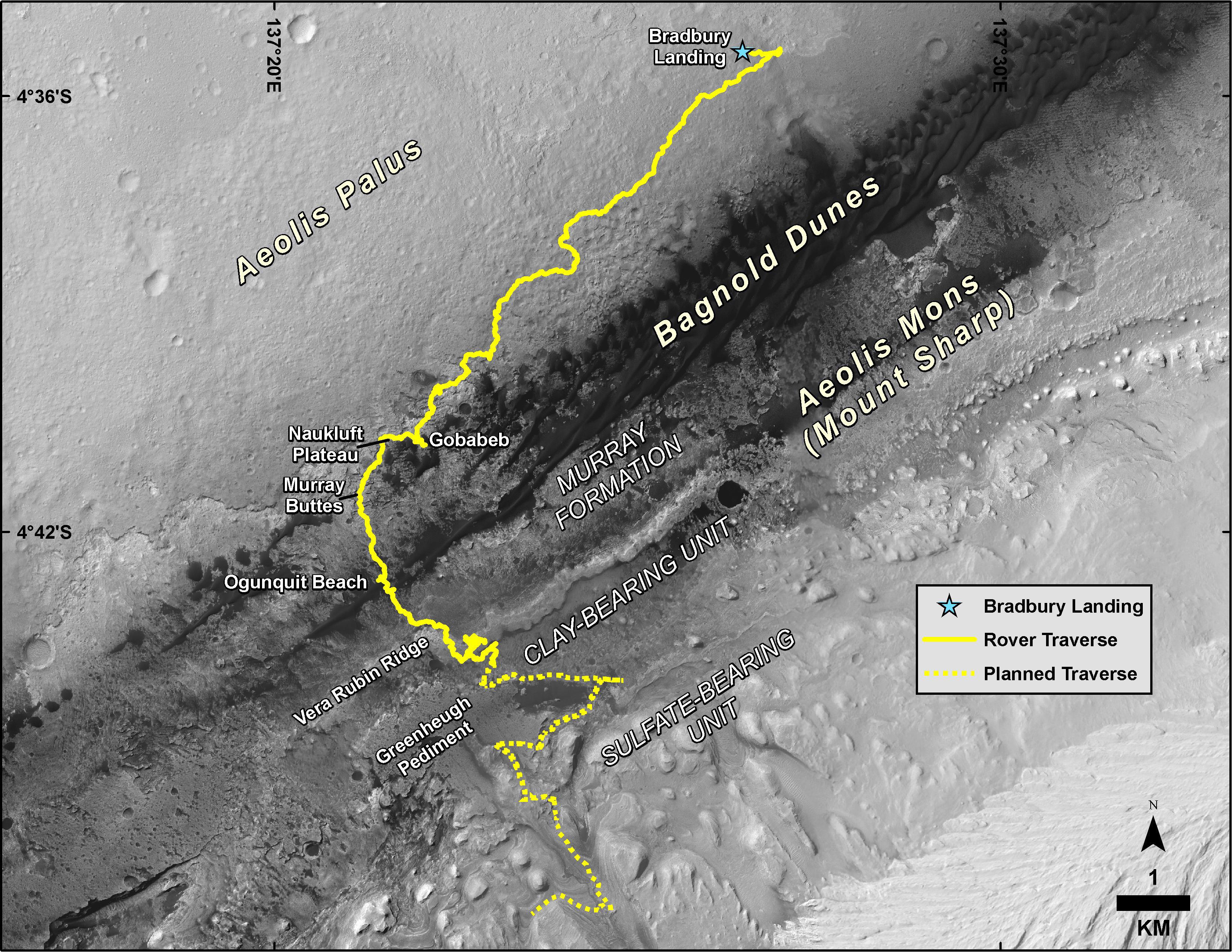
 Bis Mitte 2019 die Karte mit der Route von Curiosity.
Bis Mitte 2019 die Karte mit der Route von Curiosity.Diese Karte zeigt die Route, die der Rover
Curiosity von der Landestelle im August 2012 bis zum Standort im August 2019 zurücklegte, sowie den geplanten Weg zu weiteren geologischen Schichten des unteren
"Mount Sharp". Der blaue Stern in der Nähe des oberen Zentrums markiert
"Bradbury Landing", den Ort, an dem
Curiosity am 5. August 2012,(6. August, EDT und Weltzeit), auf dem Mars ankam.
Curiosity landete auf
Aeolis Palus, der Ebene um
Aeolis Mons, (Mount Sharp) im
Gale Crater.
Das Basisbild für die Karte stammt von der
HiRISE (High Resolution Imaging Science Experiment) auf dem
Mars Reconnaissance Orbiter. Norden ist oben. Die
"Bagnold Dunes" bilden ein Band aus dunklem, vom Wind verwehtem Material am Fuße des
Mount Sharp.
 Kredit: NASA/JPL-Caltech/Univ. of Arizonahttps://photojournal.jpl.nasa.gov/catalog/PIA23412
Kredit: NASA/JPL-Caltech/Univ. of Arizonahttps://photojournal.jpl.nasa.gov/catalog/PIA23412Curiosity ist immer noch am Standort der 22. Bohrloch
"Glen Etive".
Er analysierte mit den Laborinstrument SAM das Material der Bohrung.
Jetzt wurden noch eine Reihe von Mastcam- und Navcam-Beobachtungen durchgeführt, mit denen atmosphärische Phänomene wie Wolken und Staub untersucht wurden. Da in der Zeit der bevorstehenden Konjunktion (
die Sonne befindet sich zwischen Rover und Erde) die Kommunikation zwischen der Erde und dem Rover unterbrochen ist, müssen alle Instrumente ausgeschaltet sein und sicher verstaut werden.

Da Navcam während der Sonnenkonjunktion teilweise funktionsfähig bleibt, überwacht der Rover den Wind auch während der gesamten Pause von selbst, indem er das oben gezeigte Bild einmal pro Sol wiederholt, um festzustellen, ob sich während der Zeit Material im Arbeitsbereich bewegt.
https://mars.jpl.nasa.gov/msl/mission/mars-rover-curiosity-mission-updates/?mu=sols-2504-2505-packing-up-for-our-journey-behind-the-sunDer Standort von Curiosity an Sol 2481 auf der guten Karte von Phil Stooke.
http://www.unmannedspaceflight.com/index.php?s=&showtopic=7442&view=findpost&p=245379Beste Grüße
Gertrud