Yutu fährt weitestgehend autonom, wobei es vorher eine Strecken/Pfadplanung gibt mit der geeignetes Terrain und Ziel vorgegeben werden.
Für besonders schwierigen Situationen war Umstellung auf Fernsteuerung geplant um dann in jeweils kurze Strecken mit mehrfacher Operatorkontrolle diese zurückzulegen.
Auch während der autonomen Fahrt kann man davon ausgehen, dass die Operatoren am Boden überwachen und ggf. eingreifen. Die maximale Geschwindigkeit ist u.a. auch darauf ausgelegt und mit den Signallaufzeiten plus Reaktionszeit komme ich überschlägig auf 20 cm bis zum Nothalt. (200m/h entspr. 0,2 km/h durch 3,6 = 0,055 m/s ; mal ca. 4 s = um die 20 cm.
Dabei ist natürlich eine entsprechend vorausschauende Fahrweise angebracht.
Insgesamt ist die resultierende Fahrbewegung aber in ein mehrschichtiges System zur Navigations- und Bewegungskontrolle und Steuerung eingebunden.
Dabei wird natürlich die Grobpositionierung auf der Mondoberfläche ständig überwacht und mit der geplanten Fahrtroute/Position verglichen.
Hauptkomponenten des Navigationssystems:
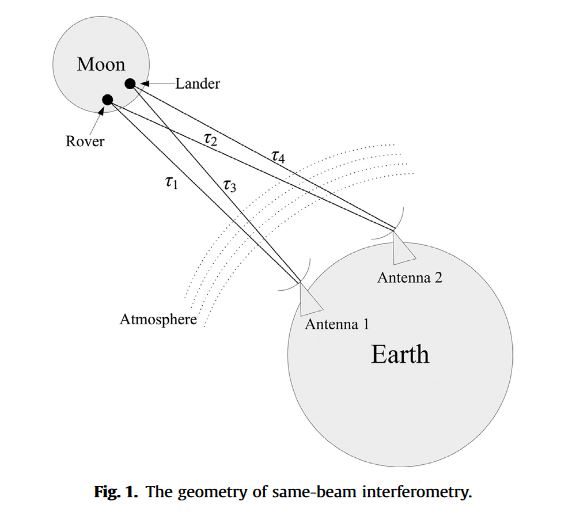
VLBI – Langbasisinterferometry - Positionsbestimmung
INS inertial navigation system – Trägheitsnavigationsystem im Rover vor Ort (Messfehler kann sich addieren und System wird immer wieder Kalibriert)
VNS visual navigation system – Visuelle Navigation mit Rover vor Ort mit Kamerasystem im Mast
(Das kommt dem Vergleich zum Lunochod am nähesten)
Hazard avoidance system – Hindernisvermeidungssystem mit Kamera im Rover unten
Dabei wird zur Hindernisvermeidung auch das Bildmaterial durch einen Operator gesichtet und die Laserpunktmatrix, die vor das Fahrzeug projeziert wird kann im Schattenbereich starke Ebenheitsunterschiede leichter erkennen lassen.
Relative position determination – Relativposition zum Lander, der als zusätzlicher Fixpunkt im System gesetzt werden kann.
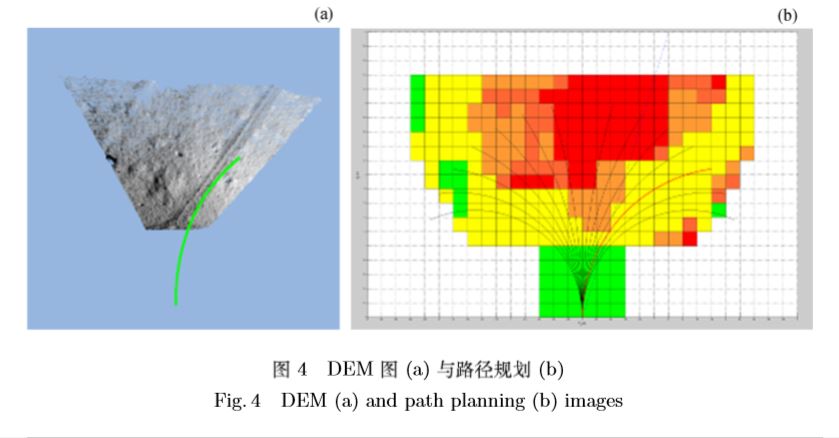
Zur Pfadplanung werden die Umgebungs/Panoramabilder herangezogen und entsprechende Teilstrecken zu Zielen definiert. Dabei wird das Terrain klassifiziert und im System hinterlegt.
Beispielbild
Bildquelle und Dokumentenlink:
http://www.cjss.ac.cn/CN/abstract/abstract2211.shtmlZur Positionsbestimmung mittels Erdfunkstellen und VLBI – Langbasisinterferometry ist hier eine schematische Darstellung:
Bildquelle und Dokumentenlink:
http://202.127.29.4/geodesy/publications/WeiJin_2013PSS.pdfDabei kann die Relativposition Lander zu Rover auch durch Nutzung beider Antennen bestimmt werden. Um das System zu Initialisieren wird gleich nach der Landung eine erste Messung durchgeführt, die mit den bekannten „Abflugpositionen“ abgeglichen werden kann um Messfehler zu erkennen.
Bildquelle und Dokumentenlink:
http://tech.scichina.com:8082/sciEe/EN/abstract/abstract518536.shtmlDas mehrschichtige Navigationssystem dient auch der Erprobung der gewählten Verfahren mit Schwerpunkt zur autonomen Fahrzeugführung.
Perspektivisch ist damit die Grundlage für einen Rovereinsatz auf der Rückseite des Mondes (Chang’e-4?) gelegt, bei dem aufgrund der weiter verlängerten Signallaufzeit (Relaissatellit hinter Mond noch als Eckpunkt) die Gesamtreaktionszeit weiter zunimmt. Für den Einsatz des chinesischen Marsrovers wird hier ebenfalls einiges getestet und validiert werden.
--- --- --- ---
Und damit ist auch gleich die Überleitung zum Antennensystem gegeben.
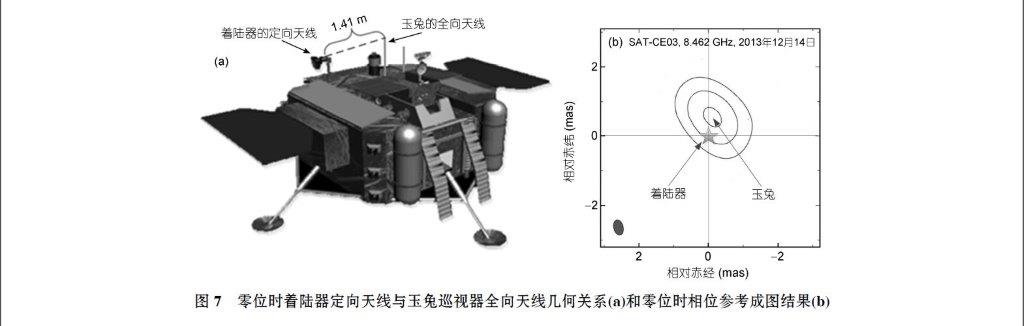
Für die VLBI Messungen wurden die X-Band Antennen von Rover und Lander genutzt.
Dabei konnte sogar eine lokale Drehung des Rovers anhand der Messergebnisse erkannt werden.
Daraus ergeben sich für mich 2 Annahmen:
1. Die beiden X-Band Antennen an der Hinterkante des Rovers haben unterschiedliche Sende- bzw. Signalwerte.
2. Die Referenzantenne bei der Bezug zum Lander gemessen wurde ist von beiden Antennen die mit den „besseren“ Werten. Entsprechend der vorangegangenen Darstellung ist es die in Fahrtrichtung rechte X-Band Antenne.
Unter Bezug auf den Link von vv zur UHF Satcom Seite im vorherigen Beitrag, versuche ich nun eine logische Zuordnung der Antennen zum Rover.
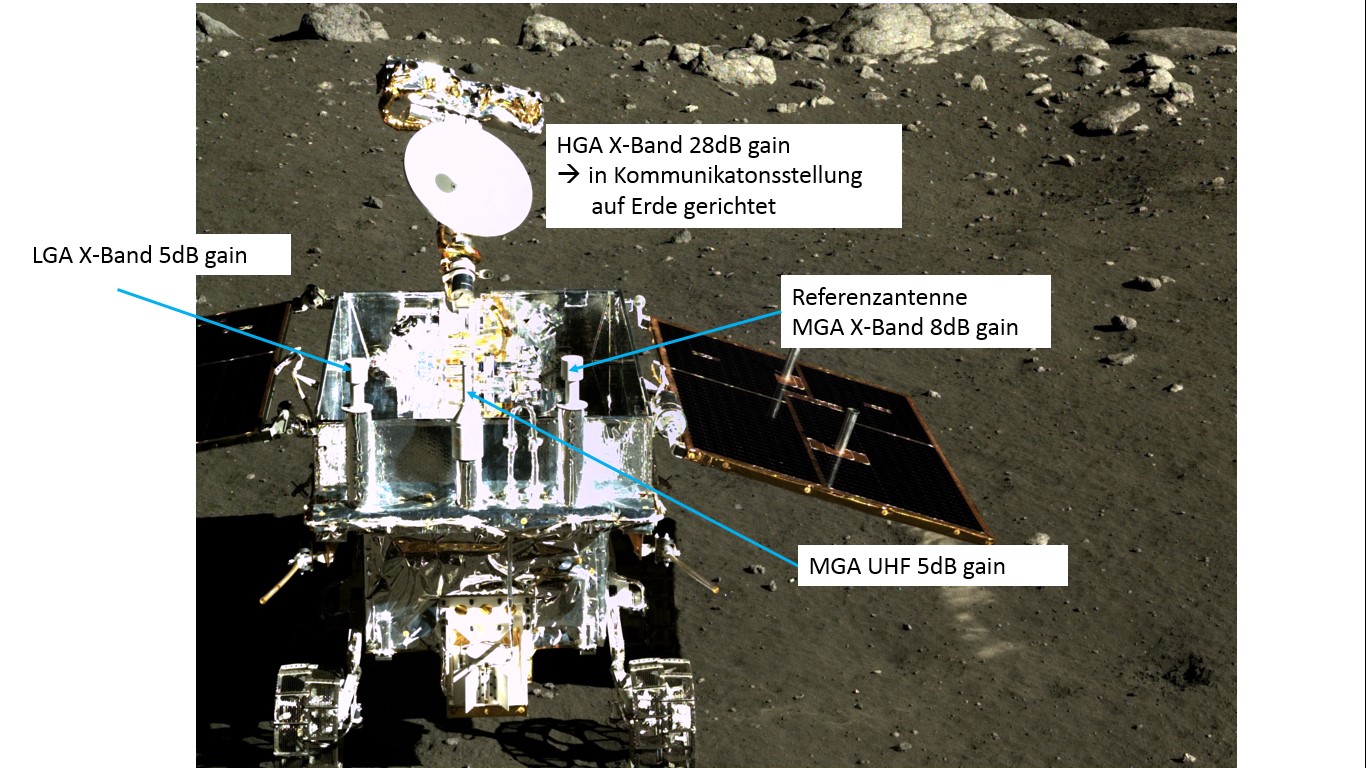
Das Originalbild, aufgenommen vom Lander am 15.12.2013 kurz nach der ersten Fahrstrecke des Rovers ist geeignet mal alle Antennen zu betrachten und gleichzeitig für die Parabolantenne deren Funktionsstellung zu erkennen.
MGA UHF 5dB gain --- UHF Antenne hinten mittig
LGA X-Band 5dB gain-- X- Band Antenne hinten links (Wert unterhalb der Referenzantenne)
MGA X-Band 8dB gain—X-Band Antenne hinten rechts (Referenzantenne)
HGA X-Band 28dB gain --- Parabolantenne am Antennemast
Bildquelle – Bild Nr 3 TCAM-I-003_SCI_P_20131215085849_0002_A_2C.png
http://planetary.s3.amazonaws.com/data/change3/tcam.htmlUm weitere Plausibilisierung der Antennentypzuweisung zu geben, habe ich die entsprechenden Unterlagen zur jeweiligen Patentanmeldung durchgesehen. Darin sind weitere technische Kennwerte enthalten, die zu Frequenzbereich, Leistungsdaten etc. Zusatzinfos enthalten.
MGA UHF 5dB gain
https://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/c7330ad477370b1891b7/CN203056100U.pdfhttp://www.google.com/patents/CN203056100U?cl=enEntsprechend meiner vorangestellten Annahme, basieren die beiden X-Band LGA und MGA Antennen auf dem gleichen Bautyp – aber mit entsprechenden Anpassungen an die gewählte Frequenz (Antennenlänge etc.):
LGA X-Band 5dB gain und MGA X-Band 8dB gain
https://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/23d31fe22dd2ca8b3a64/CN103247865A.pdfhttp://www.google.com/patents/CN103247865A?cl=enHGA X-Band 28dB gain
https://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/0355322396a029dbf413/CN204011738U.pdfhttp://www.google.com/patents/CN204011738U?cl=en&hl=dehttps://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/75d0022ee3442276bb55/CN103022723A.pdfhttp://www.google.com/patents/CN103022723A?cl=en&hl=deUnd zur Vollständigkeit noch das entsprechende Dokument zum Antennen/Kameramast
https://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/7e6b7d6338b2c3324c42/CN103754391A.pdfhttp://www.google.com/patents/CN103754391A?cl=en&hl=de--- --- --- ---
Zur „Verrenkung“ des Antennen/Kameramastes:
Der gewählte Aufbau mit Schwenkachsen und Antrieben läßt jeweils nur eine Primärnutzung zu, d.h. entweder Kamera zielgerichtet im Sichtfeld für Fahrt und Umgebung ausrichten – ODER – Parabolantenne für gezielte Datenübertragung zur Erde ausrichten.
Daher folgt die Parabolantenne überwiegend der Kameraausrichtung und es gibt nur ein paar Aufnahmen vom Lander, auf denen die Parabolantenne zur Erde ausgerichtet zu erkennen ist.
Die Aufnahme mit dem schrägen Mast und Parabolantenne (siehe oben) ist unmittelbar nach der Landung entstanden und scheint innerhalb des ersten Systemtest erfolgt zu sein.
Der Rover steht in Nordrichtung wenige Meter vor dem Lander.
Der Lander steht mit der Absenkrampe des Rovers nach Norden und seine Rückseite mit der Parabolantenne steht nach Süden und ist zur Erde ausgerichtet.
Auf dem folgenden Bild kann man die Höhenausrichtung der Parabolantenne erkennen. Ich würde so 40° bis 45° schätzen. Mit der Landeposition im Mare Imbrium bei 44,115° N 19,515° W kommt das mit dem Breitengrad auch ganz gut hin.

Bildquelle:
http://www.sc.xinhuanet.com/content/2016-02/02/c_1117970642.htmDer Rover muss den Antennen/Kameramast dann auch entsprechend Richtung Süden und einen vergleichbaren Höhenwinkelbereich ausrichten.
Das kann das obige Bild des Rovers ganz gut in die Richtung passen.
Damit ergibt sich aber auch in der Missionsplanung jeweils ein Zwischenstopp um große Datenmengen zu übertragen.
Die Live-Kamerabilder werden dann wohl über die LGA und MAG X-Band Antenne übertragen. Evtl. Terrain Kamera über die eine und Hindernisvermeidungskamera über die andere.
dksk