Ich hatte mich gefragt, wie bei Hayabusa2 die MINERVA (MIcro / Nano Experimental Robot Vehicle Asteroid) Rover aussehen, nachdem bei Hayabusa 1 das Absetzen auf den Asteroiden nicht erfolgreich war. Einige Recherche ergab dann folgends:
Minerva-I in der Flugversion für Hayabusa 1 (Muses-C)

Bild des Solarpanels von Hayabusa 1 von Minerva-I aus gesehen, nach dem Abkoppeln

Minerva-I von Hayabusa 1 aus gesehen.
Der Rover wurde fälschlicherweise abgekoppelt, als sich Hayabusa vom Asteroiden weg bewegte, nicht auf ihn zu.
Im oben verlinkten Magna sind sie neben dem deutschen Beitrag MASCOT auch zusehen. Es handelt sich um 3 in den japanischen Artikeln immer Rover genannte Kleinstsonden, die wie MASCOT oder auch Philae zunächst passiv von dem Mutterschiff auf den Asteroiden fallen gelassen werden. Bei MASCOT soll dies bei einem Übungsmanöver zur Probenaufnahme passieren, also relativ nach an der Oberfläche. Der Begriff Rover ist vielleicht etwas Irreführend, da es sich ehr um Hopper handelt. Alle haben, wie auch MASCOT, im Innern ein Schwungrad dessen Drehimpuls für Sprünge in der Microgravitation des Asteroiden genutzt werden kann.
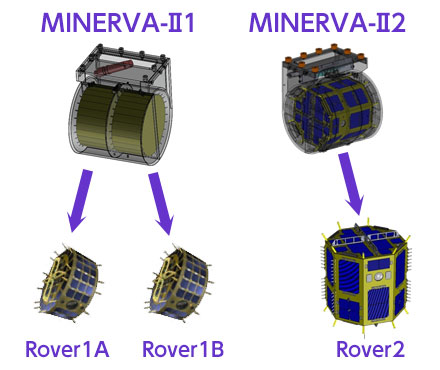
Minerva-II Rover für Hayabusa 2
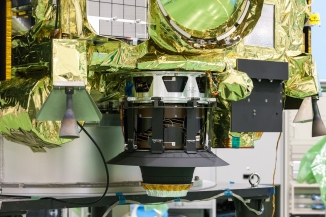
Die beiden Behälter sind neben dem Sampler Horn angebracht:
Mir ist bisher noch nicht gelungen, den Unterschied zwischen den zwei kleineren Rovern und dem größeren, der ehr Minerva-I ähnelt herauszufinden.
Mit dem Behälter wiegen die Minerva-IIA rover 2,5kg, Minerva-IIB 1,6kg.
Die Rover können die Innentemperatur nicht aktiv regeln, sind daher recht großen Temperaturschwankungen ausgesetzt. Schon bei Minerva-I wurde daher, spezielle Elektrolytkondesatoren anstatt Akkus verwendet, die -100°C am Tag und -100°C in der Nacht auf dem Asteroiden besser überstehen sollten.
Die Ausrüstung ist die die Größe der Rover und die über die kleine Solarzellenfläche begrenzt. Mitgeführt werden:
- eine monocular telephoto camera für Aufnahmen während der Sprünge
- eine clopse-up stereo camera für detailierte Aufnahmen der Umgebung
- externe und interne Thermometer
- Photodioden auf dem Körper der Rover zur Bestimmung der ausrichtung zur Sonne und zur autonomen Planung der Sprünge
- Gyroskope zur Bestimmung der Ausrichtung
- Accelerometer zur Bestimmung der Beschleunigungen während der Sprünge, als auch der Messung der gravitationskraft des Asteroiden.
Es werden folgende Ziele der Rover gesetzt:
- Erforschung der Asteroidenoberfläche über einen größeren Berich durch Sprünge in Microgravitation
- Demonstration der Autonomie: Planung der Sprünge, Auswahl der Fotos, "Überleben" der Rover im Bezug auf die Temperatur, Aktiviäten müssen während des Morgens oder des Abends stattfinden, wenn die Temperaturen im akzeptablen Bereich liegen. Bei Tag oder Nacht befindet sich der Rover in Hybernation.
- Aufklärung der physikalischen Charakteristika des Asteroiden durch die Messung der Oberflächentemperatur an verschiedenen Stellen.
Weitere technische Herausforderungen:
- Netzwerk zwischen mehreren Rovern. Mascot ist mit der gleichen Antennentechnologie ausgestattet wie die Minerva Rover.
- Positionsbestimmung der einzelnen Rover
- Demonstration eines neuen Gerätes im All (es soll also funktionieren

)
Quellen: JAXA