Es sieht danach aus, als ob China in den nächsten Jahren erst mal ein 2-phasiges Marsprojekt bezüglich Landung/Lander/Rover umsetzen wird.
Für ca. 2018 ein Orbiter und einfacher Lander mit wissenschaflichen Geräten und ca. 2020 ein größeres System mit Lander und Rover.
Bei dem ersten System werden sicherlich erst mal „einfachere“ Ansätze gewählt und aus den gewonnen Daten evtl. noch Anpassungen für die Folgemission einfließen.
Bildquelle:
http://news.qq.com/zt2013/DeepSpace/DeepSpace3.htmHier ein Film mit Bezug zur ersten Phase:
https://www.iqiyi.com/v_19rw5lh6eo.htmlDas Airbaglandesystem und Aufklappmechanismus erinnern konzeptionell stark an Mars Pathfinder – aber ohne Rover.
In dem Film kann man folgende Dinge erkennen, die im Hintergrund auf einem Planar 3D Monitor zu sehen sind und daher etwas verschwommen erscheinen:
Alle Bilder sind aus dem Film.

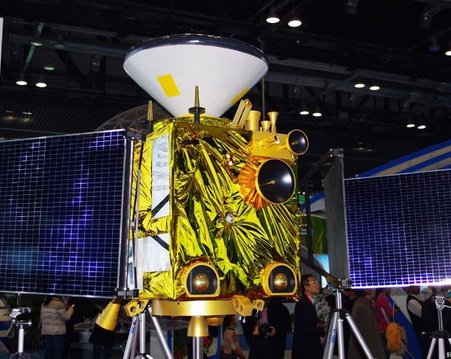
Grundkonfiguration Raumsonde mit Landemodul oben- entspricht Foto oben

Lander in ausgeklappter Konfiguration
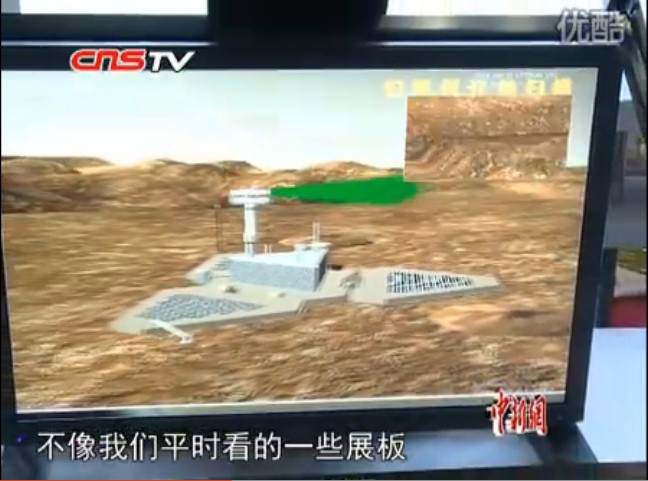
Lander mit Rundumscanner bei der Arbeit

Airbagtraube, die den Lander umgibt beim Aufsetzen (unter Mikrofon)

Lander entfaltet die 3 Flächen (hinter Mikrofon)
Das Landemodul halb entfaltet nochmal besser erkennbar als Modell:

Bildquelle und ein paar weiter Infos:
http://planete-mars.com/la-chine-bientot-sur-mars/Zum nächsten Lander – Rover – System gibt es auch einen Film ,der ebenfalls Ähnlichkeiten zu vorbekannten oder in Vorbereitung befindlichen internationalen Missionen aufweist.
Alle Bilder sind aus dem Film.

Bremsfallschirm mit Lander und entfalteten Landebeinen

Landung mit Triebwerksbremsung
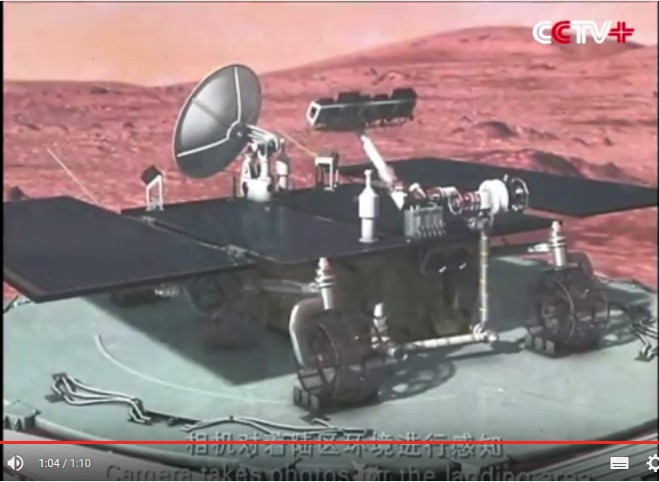
Rover entfaltet sich und die Geräte.
Der dargestellte Rover ähnelt der in den vorangegangenen Beiträgen gezeigten „Version A“.
Ein weiterer Film mit Messemodell zu Rover und Lander:
In den beiden Filmen kann man am Rover übereinstimmende und unterschiedliche Details erkennen.
Unterschiede sind vor allem die Ausdetaillierung und die Räder.
CAD Modell mit Yutu ähnlichen Rädern und Modell mit stabileren „Mars Rädern“.
Einige Ausrüstungsgegenstände sind auch Yutu-ähnlich, was auf eine gemeinsame Entwicklungsgrundlage hindeutet.
- Nachbereichskamera am Fahrzeugkörper
- Kameramast mit Panorama und Fahrkameras
- Laserpointermatrix
- UHF Antenne (Flaschenform)
Bezüglich der Antennen – hier noch ein Dokument mit Beschreibung der VLBI Technologie zur Positionsermittlung des Rovers. Auch hier sind starke Anleihen aus dem Chang’e-3 Projekt vorhanden.
http://phys.scichina.com:8083/sciG/CN/abstract/abstract518303.shtml#dksk