Roboterarm für TG-2Der Roboterarm für die Chinesische Raumstation wurde voriges Jahr auf einer Technologieausstellung vom CAST gezeigt.

Die Abmessung des Arms (über alles) wurde mit mehr als 10m angegeben. Das kann man mit dem "Normalchinesen" vergleichen, der sich die Simulation des Arms auf dem Bildschirm ansieht.
Ausserdem hat es einen Vortrag gegeben, in dem auch über die Ausstattung des zweiten Raumlabors gesprochen wurde. ... und auf einem Bild in dem Video darüber wurde auf dem TG-2 ein etwas kleinerer Roboterarm mit ca. 5 bis max. 6 m Länge gezeigt.

Nun gab es eine Überraschung zum Tag der Kosmonautik:
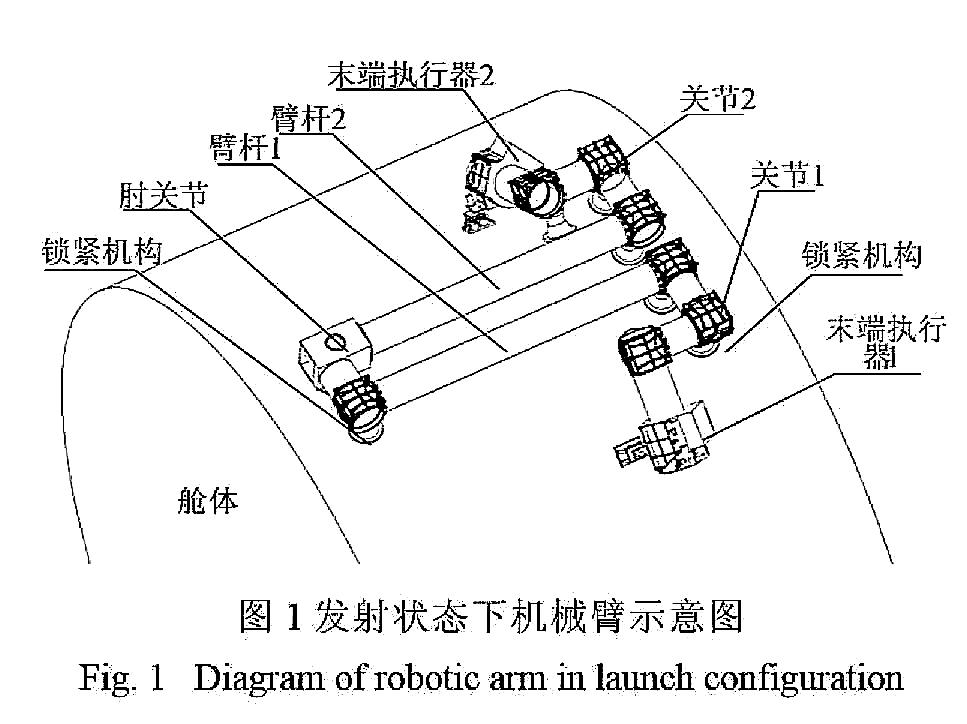
Das Befestigungs-Schema des Roboterarm (auf dem TG-2) beim Start. Bild : ChinaSpaceFlight ed.HausD
Einige Begriffe :
关持 Festhaltung ,
肘关节 Ellbogen(gelenk)
末立山而执行器 Überkopfstehen ausführender Aktuator
木干 Stab des Arms, 1 und 2 die Teilarme (ohne Gar.-HausD)
In der Beschreibung wird der stellvertretende Generaldirektor des Raum-Manipulator-System Instituts des CAST, Gao zitiert:
Auf dem Tiangong-2 Raumlabor wird ein neu installiertes Gerät, ein Roboterarm, getestet und zwar bei Aussenbordarbeiten, zur Handhabung und Wartung.Der Arm ist "selbst-kriechend" kann "laufen", was so zu verstehen ist, dass er sich dem Kopf und dem Schwanz-Teil in jede Ecke klettern kann.
Der Arm hat bereits einige Testreihen durchlaufen, so auch mit verschiedenen "Händen" (Handwerkzeugen wie Greifern und Tankstutzen -
s.a. hier weiter vorn ).
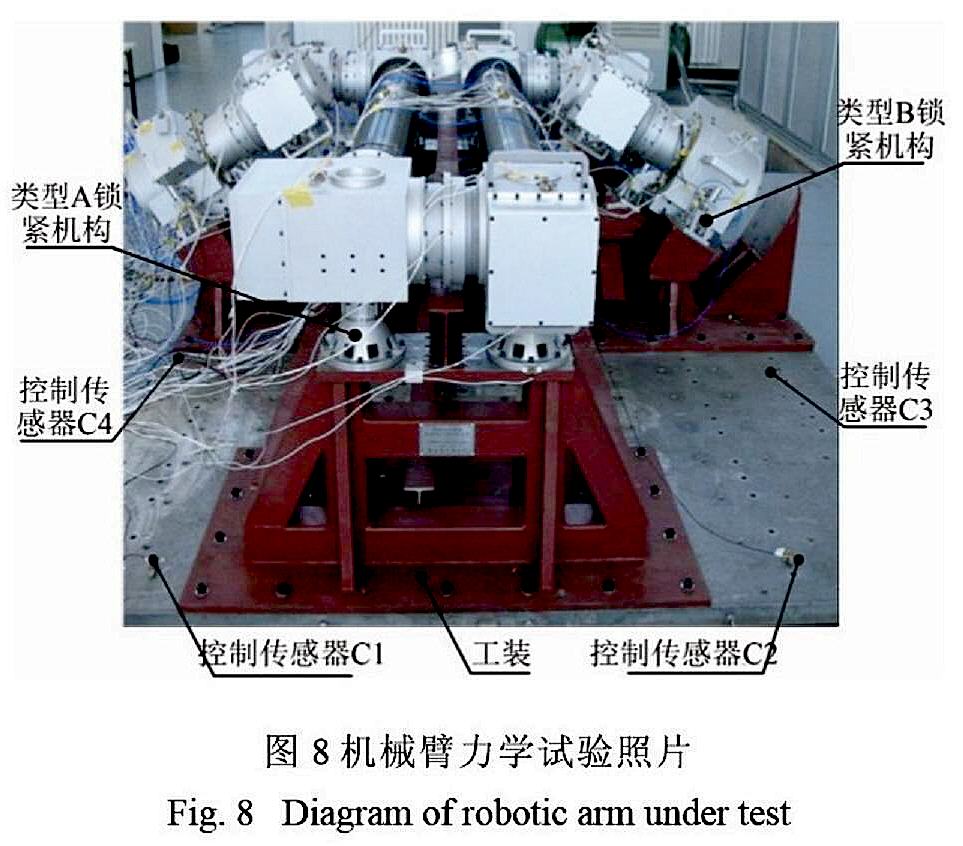
Der Arm auf dem Prüfstand. Bild : ChinaSpaceFlight
Die Veränderung durch die Tag-Nacht-Temperaturänderung wurde an den bezeichneten Punkten gemessen und die
- Abweichung des Systems mit 0.4 mm ,
- Ortsabweichung monatlich mit 45 mm ,
- Richtungsabweichung monatlich mit 1 ° ,
- Abweichung der Lineargeschwindigkeit mit 0.05 ~ 0.6 m/s und
- Abweichung der Winkelgeschwindigkeit mit 0.04 ~ 4.0 °/s
festgestellt.
Nun soll der Arm auf dem TG-2 Raumlabor getestet werden, wurde mehrfach betont.
Gruß, HausD