Ich baue seit einiger Zeit an einem Mars-Rover Modell. Dabei geht es mir nicht um einen originalen Nachbau, sondern um ein funktionales Modell, das grob wie ein Marsrover funktioniert: Es gibt eine Basisstation (das ist mein Laptop) mit einer (selbst zu schreibenden) Software zur Steuerung und Überwachung des Rovers. Damit kann man Kommandos zum Rover schicken (Wegpunkte, der der Rover anfahren soll) und Daten vom Rover (Status, Kamerabild) empfangen.
Der Rover selbst arbeitet teilautonom. Es soll sich mit Hilfe einer Kamera und Ultraschallsensoren selbst einen gangbaren Weg suchen.
Im Rover selbst arbeiten 2 Computer: Ein Raspberry Pi übernimmt die Kommunikation mit der Bodenstation und wertet die Kamerabilder und die Daten der Ultraschallsensoren aus. Da der Raspberry nur sehr wenige IO Pins hat, verwendet er einen Arduino Mega als Steuerung für die Motoren und Servos.
Als Fahrwerk dient eine 6x6 Konfiguration, wobei mir echte Geländegängkeit nicht wichtig ist. Weil ich nicht mehr als 750 € (ursprünglich nur 500 € ,aber das geht nicht) in das Projekt stecken möchte, hab ich es "Discount Mars Rover" genannt.
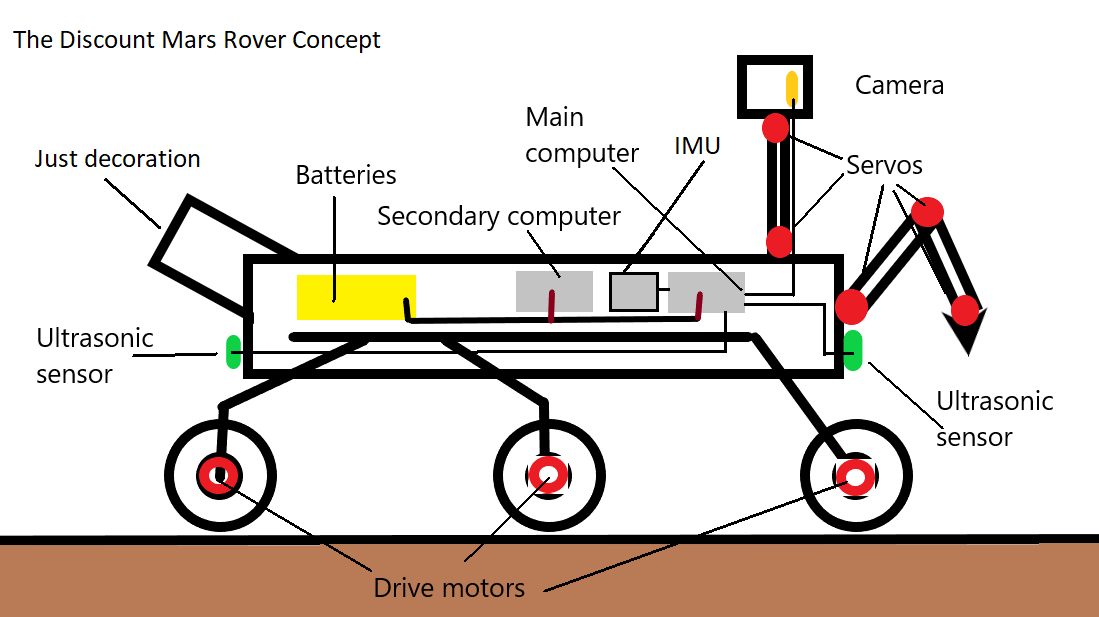
Das ganze Projekt ist gerade im Aufbau. Paar Dinge habe ich schon, das meiste ist noch Zukunftsmusik. Ich möchte parallel dazu eine Art „Web-Tutorial“ aufbauen, in der ich die wichtigsten Bauschritte erkläre – allerdings in Englisch und deshalb sind auch Bezeichner in Bildern auf Englisch. So wie in dem nachfolgenden Bild, das den prinzipiellen Aufbau des Rovers darstellt.