Obwohl das DLR Prisma schon wieder an Schweden übergeben haben, experimentiert das DLR noch weiter, halt von Schweden aus:
Erweiterte Rendezvous-Demonstration mit Hilfe von GPS und optischer Navigation Quelle:
http://www.dlr.de/blogs/de/desktopdefault.aspx/tabid-7371/12399_read-552/Das DLR bereitet sich mit Prisma weiter auf DEOS vor. Tango hat ein "unkooperatives Ziel" simuliert, dem sich Mango nur mit seinen Sensormessungen von 30km auf 3km genähert hat. Das hat insgesamt 5 Tage gedauert. Dabei hat Mango mit hoch genauer GPS-Navigation manövriert, mittels Kamera Tango erfasst und dessen relative Position und Lage bestimmt. Tango war dabei vollkommen passiv und hat sogar leicht rotiert.
Warum so langsam? Mango hat mit seiner Kamera Tango erfasst, die Daten gespeichert, beim Überflug über den Bodenstationen zur Erde gespielt. Erst hier wurden die optischen Daten in relative Positions- und Lagedaten umgesetzt und das nächste Manöver berechnet. Bei einem nächsten Überflug wurden die hinauf gespielt und Mango hat manövriert ... und so ging es schrittweise vorsichtig immer näher.
Das Ganze zeigt, wie herausfordernd ein Rendezvous mit einem "nicht kooperierenden" Ziel ist, wie schwer on-orbit-Servicing wird. Hier kommt noch hinzu, dass Mango-Tango für dieses Szenario nicht ausgelegt/optimiert sind. Sowohl Sensorik als auch Bord-Avionik können das quasi nicht, so dass viel Arbeit am Boden lag. Eine optimierte Technik (z.B. DEOS) sollte mehr Fähigkeiten im Orbit haben und autonomer arbeiten können.
Außerdem: mit EDRS (oder generell Relais-Satelliten) wäre das Ganze nochmal leistungsfähiger, v.a. zügiger, da man nicht auf die sporadischen und kurzen Überflüge angewiesen ist.
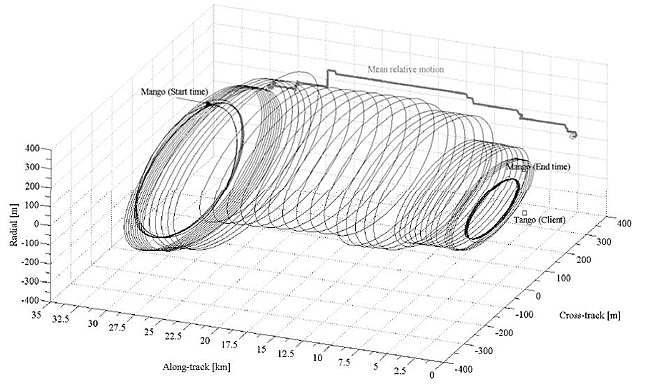
Bild: DLR - Plot der relativen Position Mango-zu-Tango. Man sieht die spiralförmige Annäherung.
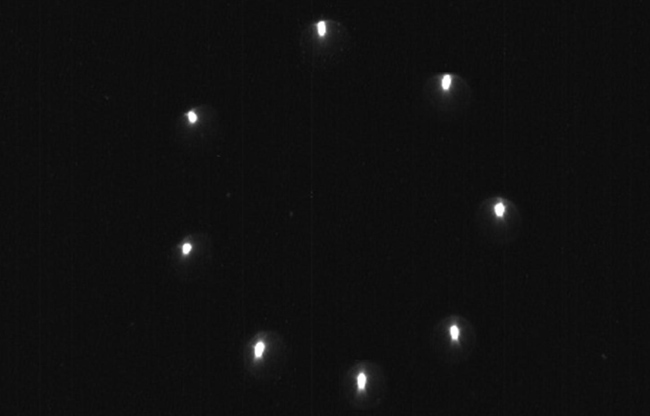
Bild: DLR - Mehrere Bilder von Tango, aufgenommen von Mango, übereinander gelegt. Auch das zeigt die relative Kreisbewegung der Satelliten zu-/umeinander.