Hallo Zusammen,
ein Hauptziel des
Axel-Systemdesigns ist die minimale Komplexität. Daher verwendet der grundlegende
Axel-Rover ein symmetrisches Design mit nur drei Aktuatoren zur Steuerung seiner Räder und einem Längslenker. Die Verbindung dient mehreren Zwecken: Sie bietet einen Reaktionshebelarm gegen den Radschub, passt die Neigung des Rovers zum Ausrichten seiner Stereokameras an und bietet Redundanz, wenn einer der Radantriebe ausfällt. Mit nur drei Aktuatoren kann dieser Rover beliebigen Pfaden folgen, sich an Ort und Stelle drehen und verkehrt herum oder mit der rechten Seite nach oben arbeiten. Das
Axel-Rover System kann problemlos verschiedene Radtypen und -größen unterstützen, von großen faltbaren Rädern bis zu aufblasbaren Rädern. Auf diese Weise kann es steiles und felsiges Gelände durchqueren und starke Stöße während der Landung oder Fahrt tolerieren. Darüber hinaus ist der
Axel -Rover so konzipiert, dass die Sensoren, Aktoren, Elektronik, Leistung und Nutzlast gleichzeitig im Zentralzylinder angeordnet sind. Diese Konfiguration bietet Kompaktheit beim Start und Robustheit gegenüber extremen Umwelteinflüssen bei Planetenmissionen. Der Axel-Prototyp in Abbildung 1 ist mit Rechen- und Kommunikationsmodulen, Stereokameras und einem Trägheitssensor für die autonome Navigation mit Hindernisvermeidung ausgestattet.
Die Grundkomponente ist der
Axel Rover und bildet das
DuAxel (Dual-Axel) Rover System für die vielseitige Mobilität auf den Planetenoberflächen im Sonnensystem.
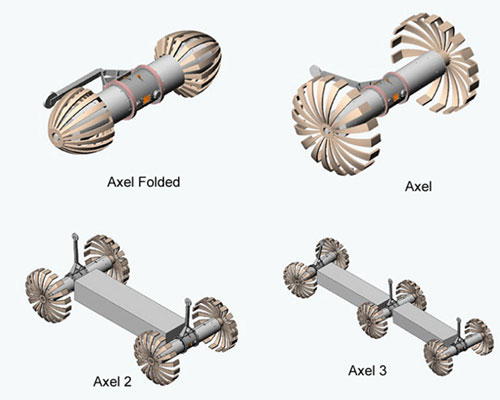
 Kredit: NASA/ Issa A.D. Nesnas Das Axel Rover System.
Kredit: NASA/ Issa A.D. Nesnas Das Axel Rover System.Oben links und im Uhrzeigersinn: (a) Axel in einer verstauten Konfiguration für den Flug, (b) ein Axel in seiner Oberflächenmobilitätskonfiguration, (c) ein Axel2 mit zwei Achsen, die ein einzelnes Nutzlastmodul tragen, und (d) und Axel3 mit zwei Nutzlasten Module.
 Kredit:Issa A.D. Nesnas https://www-robotics.jpl.nasa.gov/systems/system.cfm?System=16
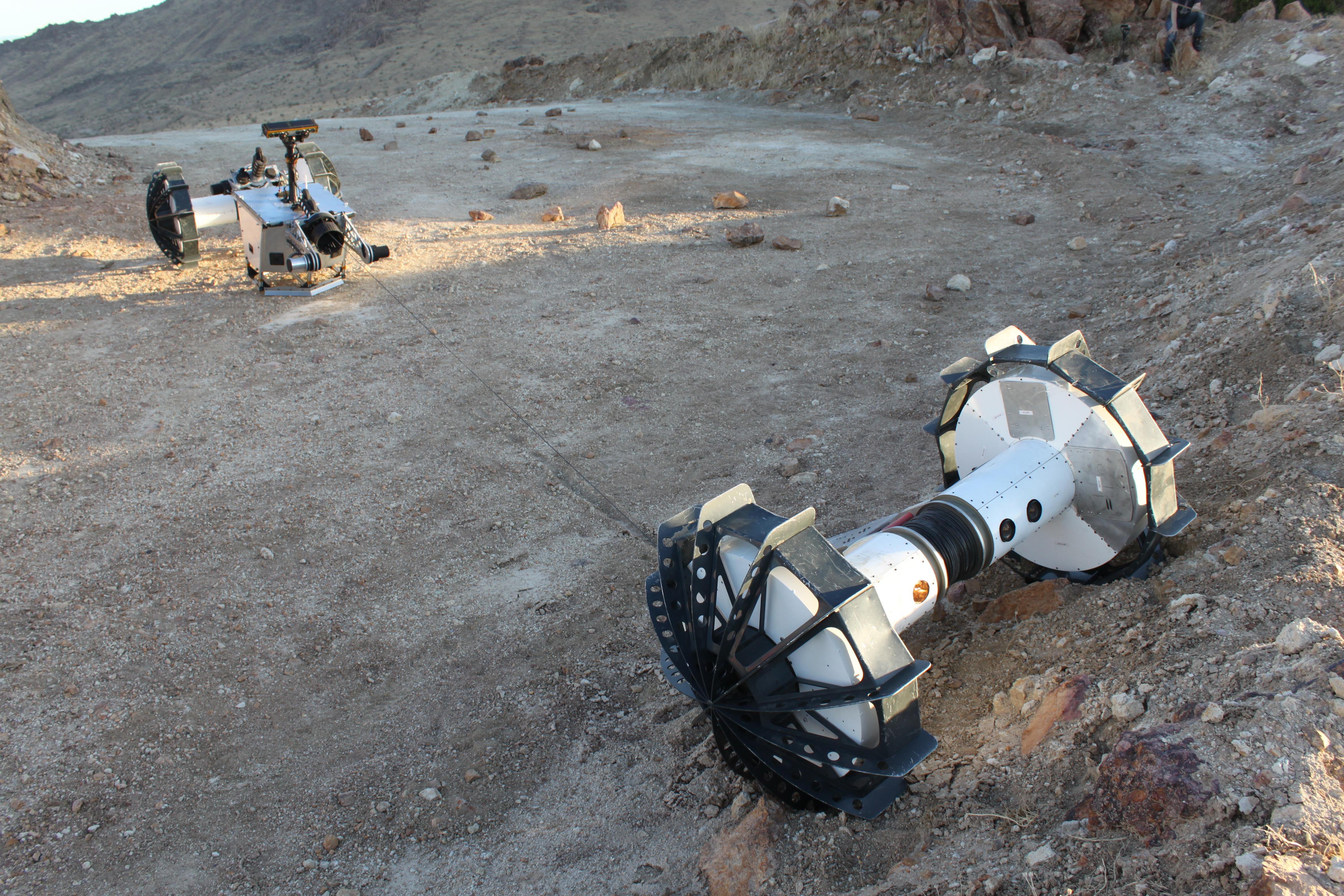
Kredit:Issa A.D. Nesnas https://www-robotics.jpl.nasa.gov/systems/system.cfm?System=16 Auf diesem Foto navigiert ein
angebundener Axel-Roboter - Teil des vierrädrigen
DuAxel-Rovers - während eines Feldtests in der
Mojave-Wüste über einen steilen Hang. Das Seil ist mit der anderen Hälfte des Rovers verbunden und dient als eine Art Kletterseil und bietet gleichzeitig Strom und Kommunikation.
In der Vergrößerung ist die Seilwinde sehr gut sichtbar.
 Kredit: NASA/JPL-Caltech/J.D. Gammellhttps://photojournal.jpl.nasa.gov/catalog/PIA24110
Kredit: NASA/JPL-Caltech/J.D. Gammellhttps://photojournal.jpl.nasa.gov/catalog/PIA24110Der
DuAxel Rover nimmt an einem Feldtest in der
Mojave-Wüste in Kalifornien teil. Der vierrädrige Rover besteht aus zwei separaten zweirädrigen Axel-Robotern, die über ein Seil miteinander verbunden sind. Wenn der Roboter über große Entfernungen fahren muss, arbeitet er als ein herkömmlicher Rover mit vier Rädern. Sobald er sein Ziel erreicht hat, kann er sich trennen und in zwei Roboter verwandeln. Ein Teil verankert sich an Ort und Stelle, während der andere einen Haltegurt verwendet, um ansonsten unzugängliches Gelände zu erkunden. Diese Flexibilität wurde unter Berücksichtigung von Kraterwänden, Gruben, Steilhängen, Lüftungsschlitzen und anderem extremen Gelände entwickelt.
 Kredit: NASA/JPL-Caltech/J.D. Gammellhttps://photojournal.jpl.nasa.gov/catalog/PIA24108Der DuAxel macht eine angebundene Achse frei
Kredit: NASA/JPL-Caltech/J.D. Gammellhttps://photojournal.jpl.nasa.gov/catalog/PIA24108Der DuAxel macht eine angebundene Achse frei, um eine Steigung zu erkunden.
Während eines Feldtests in der
Mojave-Wüste trennt sich der
DuAxel-Roboter in
zwei einachsige Roboter, so dass man einen für herkömmliche Rover zu steilen Hang abseilen kann. Die Verbindung, die beide Achsen verbindet, ermöglicht es dem einen Roboter nicht nur, den Hang hinunterzufahren, während der andere an Ort und Stelle verankert bleibt, sondern bietet auch Strom und eine Kommunikation mit dem darüber liegenden Verankerungsroboter.
 Kredit: NASA/JPL-Caltech/J.D. Gammellhttps://photojournal.jpl.nasa.gov/catalog/PIA24109
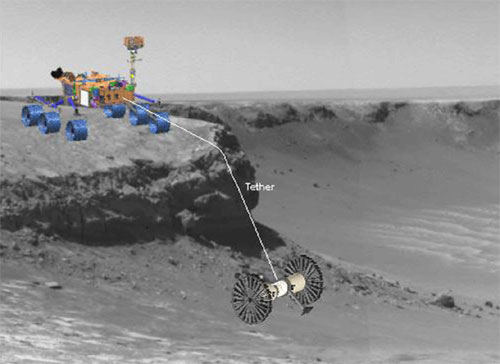
Kredit: NASA/JPL-Caltech/J.D. Gammellhttps://photojournal.jpl.nasa.gov/catalog/PIA24109Ein weiterer großer Vorteil des
Single-Axel-Designs ist seine mögliche Verwendung als Teil eines größeren Systems. Bei einem Konzept wird ein einzelner Axel verwendet, der von einem größeren Rover mit dem Haltegurt für den Zugang zu steilem Gelände eingesetzt wird.
 https://www-robotics.jpl.nasa.gov/systems/system.cfm?System=16
https://www-robotics.jpl.nasa.gov/systems/system.cfm?System=16JPL leitete das Team, das den
Axel Rover in Zusammenarbeit mit
Prof. Raymond Cipra von der
Purdue University und
Prof. Murray Clark von der
Arkansas Tech University entwickelte. Aktuelle Arbeiten zu Axel werden in Zusammenarbeit mit
Prof. Joel Burdick von Caltech durchgeführt.
Beste Grüße, Gertrud