[size=18]Das Rendezvous des ATV mit der ISS[/size][/b]
Der Erststart einer der zweifelslos anspruchvollsten Beiträge der ESA zur ISS, das ATV, ist nun absehbar.
Daher anbei das 2002-ESA-Missions-Scenario zum Rendezvous des ATV mit der ISS.
Beginn der ATV Aktivität nach dem Start mit Ariane 5Ariane 5 platziert das ATV in einen Orbit mit 51,6 Grad Inklination und einer Bahnhöhe von 200 bis 300km,
50km bis 100km unterhalb der ISS, abhängig vom jeweiligen Orbit der ISS zu jener Zeit.
Mit der Trennung von der Ariane 5 werden die benötigten Systeme des ATV automatisch aktiviert, das ATV
stabilisiert seine Lage, entfaltet seine Solarzellenflächen und stellt eine Funkverbindung mit dem ATV
Control Center in Toulouse (ATV CC) über das NASA TDRSS und ESA Artemis Kommunikationsnetzwerk her.
BahnebenenanpassungEine Reihe von Orbitalmanöver bringt das ATV in einen vorläufigen Orbit 10km bis 15km unterhalb der ISS.
Sobald sich das ATV der ISS auf 200km angenähert hat, wird es durch Trimmanöver in die exact selbe Bahnebene
wie die ISS gebracht, wobei es sich aber immer noch leicht unterhalb der Bahnhöhe der ISS befindet, sodaß sich
das ATV weiterhin durch eine höhere Bahngeschwindigkeit der ISS annähert.
Die Serie der Orbitalmanöver bis zum Punkt S0, 30km hinter der ISS:
(OMP: Onboard Mission Plan)
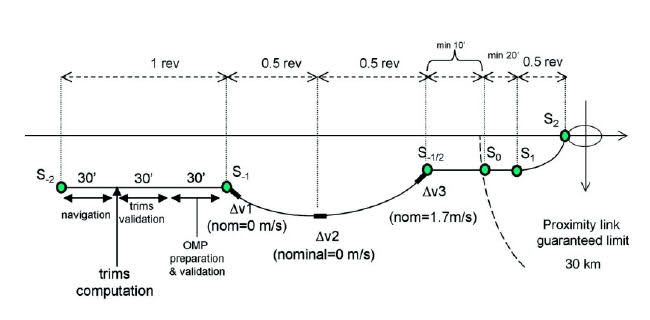
Am Punkt S0, 30km hinter der ISS, nimmt das ATv eine Funkverbindung mit der ISS auf, um die Navigation relativ zur ISS mit GPS Daten durchzuführen. Die Auswertung wird vom ATV, mit GPS Daten von GPS Empfängern sowohl im ATV und als auch in der ISS, durchgeführt.
OrbitanpassungAm Punkt S1, ca. 20km hinter der ISS, erhält das ATv vom ATV CC die Anweisung mit dem "Homing Manöver"
zu beginnen, welches zwei Schubphasen beinhaltet und ungefähr 45min dauert. Es befördert das ATV in den selben Orbit wie die ISS und ungefähr 3,5km hinter diese. Das ATV befindet sich dabei weiterhin außerhalb des sogenannten "ISS Approach Ellipsoid" (ein Ellipsoid von 4000m x 2000m x 2000m in dessen Zentrum sich das Massenzentrum der ISS befindet, und dessen Längsachse mit dem Geschwindigkeitsvektor der ISS zusammenfällt).
Alle ATV Manöver innerhalb der Approach Ellipsoid sind sogenannte "vereinte Operationen", in die neben dem
ATV CC auch die Mission Control Center in Houston und Moskau eingebunden sind.
Der Punkt S2 ist der erste (in Bezug auf die ISS) stable Haltepunkt des ATV. Es verharrt hier bis zu 90min in der
Vorbereitunsphase für die endgültige Annäherung.
Annäherung 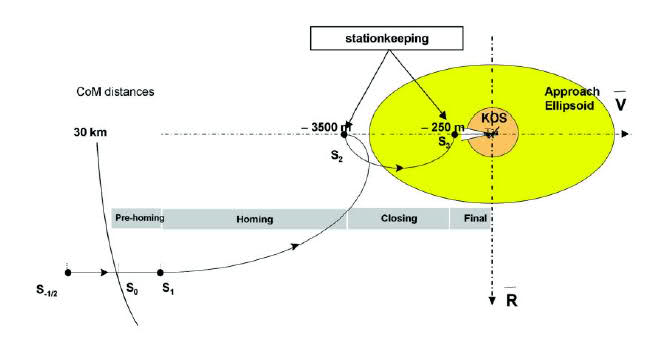
Sobald vom Mission Control Center in Houston das GO für die Einleitung der Annäherung erfolgt, wird das ATV vom ATV CC angewiesen die Approach Ellipsoid anzufliegen. Dieses Manöver bringt das ATV bis auf 250m hinter
die ISS zum Punkt S3. Absolut unerlaubt ist es dem ATV in die "ISS Keep Out Zone" einzudringen (eine Kugel mit 200m Radius, im Zentrum das ISS-Massenzentrum, mit der Ausnahme eines Anflugkegels zur ISS). Die Einhaltung dieses Zutrittsverbotes wird garantiert in dem das ATV in einer "exzentrischen Annäherung" von Punkt S2 zu Punkt S3 gebracht wird. Mittels zweier Schubphasen rechtwinkelig zum Orbitbahntangenten wird dabei das ATV innerhalb eines halben Orbits nach S3 befördert. Sollte das Bremsmanöver in S3 fehlschlagen so führt die eingeschlagene Bahn des ATV innerhalb eines weiteren halben Orbits zurück zu S2.
Endannäherung und Docking 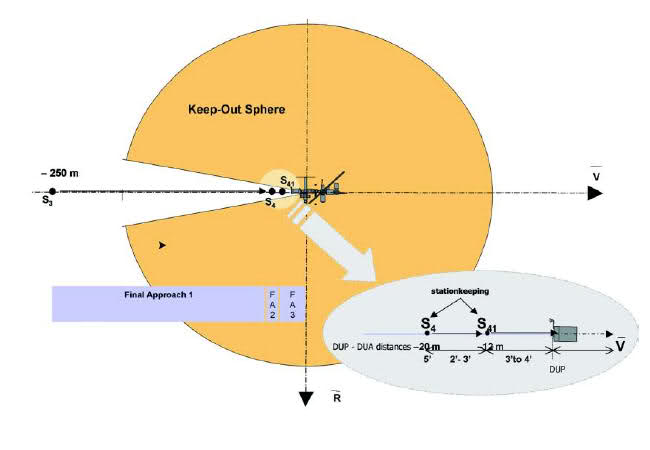
Zwischen S3 und dem Docking nähert sich das ATV auf einer "erzwungenen Bahn" entlang des ISS Geschwindigkeitsvektors dem hinteren Dockingport von Zvezda. "Erzwungen" bedeutet das zusätzlich zu den 220N Hauptantriebsdüsen, welche das ATV Richtung ISS befördern, auch zusätzliche rechtwinkelig dazu angebrachte Schubdüsen feuern und Schub Richtung Erde aufbringen, um die Orbiterhöhung durch den tangentiellen Schub zu kompensieren. Um ein sicheres Andocken und eine akzeptable Last zu erzielen muß der Docking Adapter vom ATV jenen von Zvezda in einer maximalen Abweichnung von 10cm und einer maximale seitlichen Geschwindigkeitsabweichung von 2m/s treffen. Um diese Rahmenbedingungen einzuhalten stützt sich die Navigation des ATVs während der Endannäherung an die ISS auf die optischen Sensoren am ATV (und die passiven Reflektoren nahe am DockingPort von Zvezda). Dabei werden die Messungen des Videometer-Primärsystems vom Navigationskontrolsystem (GNC) benutzt um die Bewegung und Ausrichtung des ATV zu steuern, und mittels der Daten des Telegoniometer-Sekundärsystems wird das GNC vom Flugüberwachungssystem (FMC) überprüft.
Funktionsprinzip des Videometers
Das Videometer stellt Entfernungsdaten und Winkelabweichungen dem GNC zur Verfügung.
Ein, von an der Front des ATVs angebrachten Laserdioden erzeugter, divergierender Laserstrahl wird dabei
von einer Anordnung von Reflektoren an Zvezda zurückgeworfen, und das Reflektionsmuster von
CCD-Sensoren aufgenommen. Dabei gibt die Mustergröße Auskunft über die Entfernung und die Position und
die Form des Musters auf dem CCD gibt Aufschluß über die Winkelabweichung.
Funktionsprinzip des Telegoniometers
Das Telegoniometer stellt Entfernungsdaten und Winkelabweichungen dem FMC zur Verfügung. Laserimpulse
von Laserdioden tasten den Bereich der ISS ab und werden von 3 Reflektoren an Zvezda zurückgeworfen.
Aufgrund von Laufzeitmessungen kann die Entfernung ermittelt werden. Die Stellung von 2 Strahllenkspiegeln
geben Aufschluß über die Winkelabweichung.
Sobald die Rendezvousdaten gründlich ermittelt wurden, gibt das ATV CC dem ATV die Anweisung Punkt S3 zu verlassen und den Anflugkegel in der "ISS Keep Out Zone" anzufliegen. Die folgende Endannäherung erfolgt in einzelnen Schritten, jede gestartet vom ATV CC und automatisch ausgeführt vom ATV bis zum nächsten Haltepunkt.
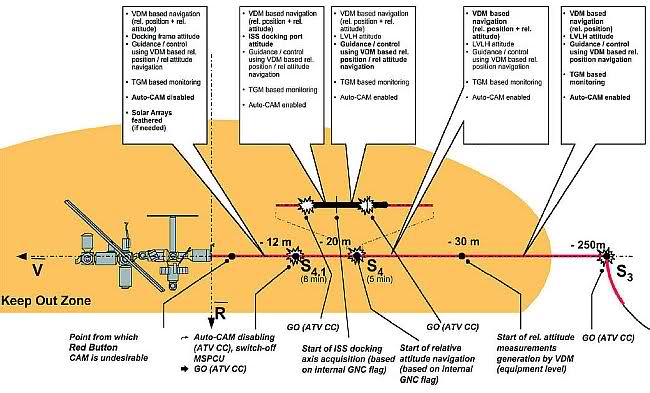
S3 bis S4; 20m bis zum Docking.
Das ATV richtet sich aufgrund der Daten des Videometers zur Winkelabweichung zum Geschwindigkeitsvektors der ISS aus und nähert sich der ISS damit auf dessen Geschwindigkeitsvektor.
S4 bis S4.1; 12m bis zum Docking.
Kurz bevor S4 erreicht wird, wird der Sensor Mode gewechselt. Von nun an richtet das ATV seine Längsachse nicht mehr nach dem Geschwindigkeitsvektor der ISS sondern nach der Längsachse von Zvezda aus, und folgt dabei den Bewegungen der ISS.

S4.1 bis Docking
Am Punkt S4.1, 12m hinter der ISS, führt das ATV einen letzten Haltepunkt aus. Sobald Crew und Bodenpersonal bestätigen, das die Annäherung normal ist, erhält das ATV vom ATV CC die letzte Anweisung zum endgültigen Docking. Die Crew überwacht diese letzte Annäherung mit Einrichtungen die unabhängig von den Systemen des ATVs sind (Zvezda Video Camera Visual System und Entfernung- und Entfernungsänderungsangaben vom russischen Kurs Rendezvous System in Zvezda).
SicherheitsmaßnahmenIm Einklang mit dem Prinzip der Zweifehlertoleranz bezüglich Fehlfunktionen die die Sicherheit der Crew gefährden könnten sind alle Funktionen die Rendezvous und Docking betreffen zweifachfehlertolerant ausgelegt.
Ein Einzelfehler führt zu keiner Beeinträchtigung des Manövers. Ein zweiter Fehler in der selben Verarbeitungskette
führt zu einer Funktionsbeeinträchtigung des ATV wobei die Sicherheit noch gewährleistet ist, indem ein Escape-Manöver, ein sicheres Entfernen von der ISS durchgeführt wird. Während des Rendezvous-Manövers sind sowohl GNC wie auch FCM aktiv. Das "Proximity Flight Safety (PFS) System überwacht permanent die Bahndaten. Im Falle einer Verletzung der vorgesehenen Parameter löst es ein Collisions-Abwendungs-Manöver (CAM) aus, welche das ATV in eine sichere Fluglage weg von der ISS bringt. Zusätzliche Sicherheit wird erreicht durch den permanenten Kontakt des ATV mit dem ATV CC, welches jederzeit die Mission stoppen kann. Während der Endannäherung überwacht auch die ISS-Crew das ATV und kann das Kommando zum Stoppen oder zum Entfernen auslösen.
Und das wollen wir sehen:

m.f.G.
James