Hallo,
jetzt hat das JPL auch die offizielle Pressemitteilung herausgegeben :
http://marsrovers.nasa.gov/newsroom/pressreleases/20090424a.html Und zu den Ereignissen der letzten Woche gibt es dann noch diese Meldung im Portal - allerdings nur in Bezug auf Spirit :
http://www.raumfahrer.net/news/raumfahrt/24042009224143.shtml Die heutige Fahrt ging also über 1,7 Meter und war lediglich ein Test, um das Verhalten von Spirit besser beurteilen zu können. Laut den geplanten Fotosequenzen der Cornell-Universität ist für morgen keine Weiterfahrt vorgesehen ( Bis jetzt wurden lediglich Kommandos für die Panoramakamera übermittelt ). Ihr könnt also ganz entspannt zum
Berliner Stammtisch-Treffen erscheinen und dort weiter diskutieren....
Das JPL hat übrigens auch ( mit einem Tag Verspätung ) das
wöchentliche Rover-Update für Spirit und Opportunity online gestellt. Daraus geht hervor, dass Opportunitys Energielevel leider auf jetzt nur noch 447 Wattstunden/ Sol abgesunken ist. Dafür hat der Rover ordentlich "Gas gegeben". Bis vorgestern ( Sol 1865 ) wurden insgesamt 15.737,05 Meter auf der Marsoberfläche zurückgelegt.
Und weil wir gerade bei Opportunity sind : Exploratorium is back....Die Bilder von Spirits Fahrt sind zwar für uns hier verloren ( aber nicht für die Leute am JPL!!! ), aber dafür sind die aktuellen Opportunity-Fotos online. Und so sieht es also aus, wenn der Rover 30 Zentimeter rückwärts fährt :
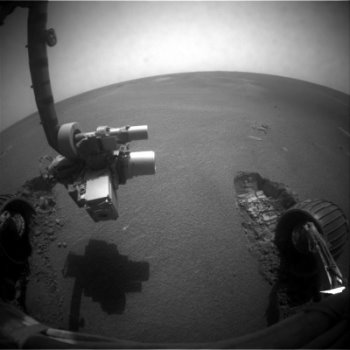
Image Credit : NASA/ JPL/ Cornell University
Größere Version hier :
https://images.raumfahrer.net/up026182.JPG Anscheinend haben wir Glück gehabt. Der Rover hat zwar 30 Zentimeter zurückgesetzt, aber die Roverdriver hatten hierfür eigentlich eine Fahrstrecke von über fünf Metern vorgesehen. Ein Anzeichen dafür, wie stark die Räder an dieser Stelle im Sand durchgedreht haben. Warum ist Opportunity aber überhaupt in dieses Schlamassel hereingeraten?
Beide Rover führen im Laufe ihrer Fahrten regelmäßig sogenannte "Slip Checks" durch. Sie überprüfen anhand ihrer Software, ob die Räder eine gute Bodenhaftung haben und der Rover sich also wirklich vorwärts bewegt, oder ob die Räder im Sand lediglich durchdrehen und man gerade dabei ist, sich z.B. in einer Düne festzufahren. Ein jeder dieser Tests benötigt aber eine Zeitspanne von 5 bis 12 Minuten. Deshalb werden sie aus Gründen der Zeiteinsparung nur etwa alle 10 bis 20 Meter durchgeführt. Dies trifft sowohl für die "Blind Modus"-Fahrten ( der Rover fährt auf "gut Glück" eine Distanz von maximal 50 Metern ) als auch für die "Autonavigationsfahrten" ( der Rover sucht sich mit Hilfe seiner Wegerkennungssoftware selbstständig eine Fahrtroute ) zu. Am JPL sind die Roverdriver der Meinung, dass es möglich sein sollte, aus einer aus dieser Vorgehensweise resultierenden Gefahrensituation innerhalb von zwei Fahrtagen wieder auf sicheren Untergrund zu gelangen. Und zumindestens diesmal scheinen sie auch recht zu haben...
Ansonsten war dieses Ereignis anscheinend keine Überraschung am JPL. Die Lee-Seiten der kleinen Dünen scheinen aus einem extrem feinen, nahezu kohäsionslosen Sand zu bestehen, welcher schon mehr an eine Art Pulver erinnert. Die Luv-Seiten dagegen haben eine kompaktere Zusammensetzung mit einer entsprechenden Griffigkeit. Warum aber hat der Rover dann die Lee-Seite gewählt? Die Software ist zwar intelligent, aber auch extrem praktisch veranlagt. Desto höher eine Düne ist, desto schwieriger ist sie zu überqueren. Der Rover hat einfach die Seite gewählt, welche flacher ausgefallen ist. Und das war in diesem Fall die( schlechte ) Lee-Seite - einfach nur Pech gehabt...
Schöne Grüße aus Hamburg - Mirko