Der Abstoßmechanismus von PhilaeDer Mechanismus, der Philae vom Orbiter abtrennt und auf seine Abstiegstrajektorie bringt,
ist ziemlich ungewöhnlich – deshalb hier eine etwas ausführlichere Darstellung.
Üblicherweise werden solche Abtrennvorgänge im Weltraum mittels vorgespannter Federpakete bewirkt, die per Auslösekommando von pyrotechnischen Aktuatoren freigegeben werden (zB CASSINI => HUYGENS, Hayabusa =>Minerva, Mars Express => Beagle2, Mars Polar Lander => Deep Space 2 ).Da Federn in Querrichtung „weich“ sind, muss man in der Regel eine Führung des Abstoßvorgangs bereitstellen, was mit Verlustreibung verbunden und damit oft schwer vorhersagbar ist. Bei einem kleinen Zielobjekt mit so geringer Gravitation wie dem Kometen C-G muss man allerdings die Abstoßparameter sehr genau treffen, sonst verfehlt man ihn ...
Die Anforderungen bei Philae lauteten daher . Richtungsgenauigkeit = +/- 1 deg,
Genauigkeit der Abstoßgeschwindigkeit = +/- 1 % im Bereich von 0,05 m/s bis 0,5 m/s .
Da die genauen gravitativen Eigenschaften von C-G (noch) unbekannt sind, musste die wählbare Abstoßgeschwindigkeit um den Faktor 10 variabel sein.
Die hauptsächlichen Bedenken gegen die traditionelle Lösung waren:
wie schafft man die Variation der Federvorspannung -im Flug- über eine Größenordnung ?
wie viel der Federvorspannung ist nach 10 Jahren Flug in vorgespanntem Zustand überhaupt noch vorhanden (Alterung/Ermüdung der Federn)?
Um das zu lösen, wurde zunächst über ein Design nachgedacht, bei dem die Federn während des Fluges entspannt mitgeführt und erst bei Ankunft am Kometen von einem geeigneten Mechanismus gespannt wurden. Der Haken dabei: dazu muss die erreichte Federvorspannung sehr genau vermessen werden – wobei sich sofort die Frage stellt, wie genau denn die dafür notwendigen (analogen) Kraftsensoren nach 10 Jahren interplanetarem Flug noch sein würden.
Im Laufe der weiteren Konzeptentwicklung wurden dann die Federn als Energiezwischenspeicher ganz weggelassen und der Spannmechanismus so ausgelegt dass er den Lander direkt antreibt:
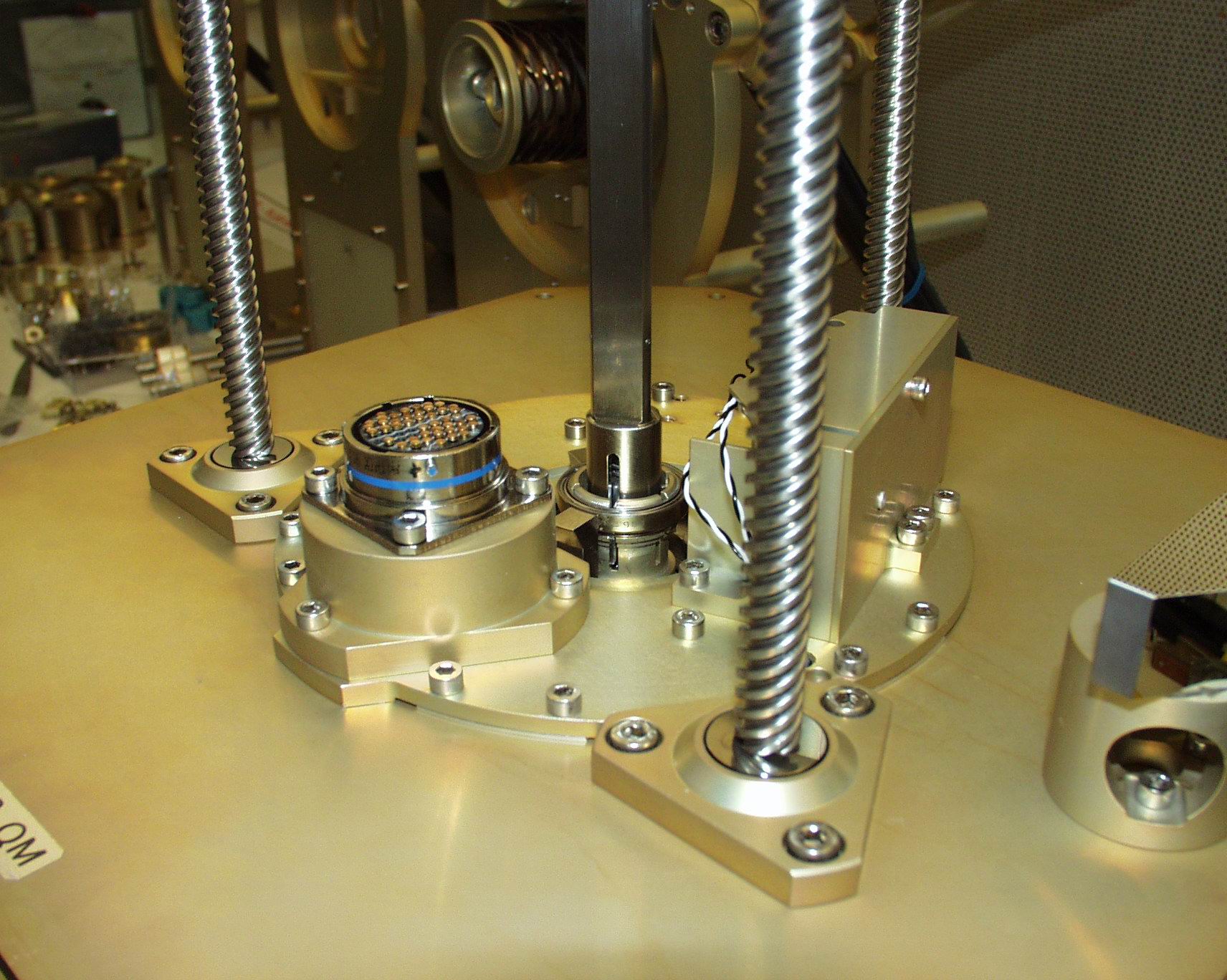
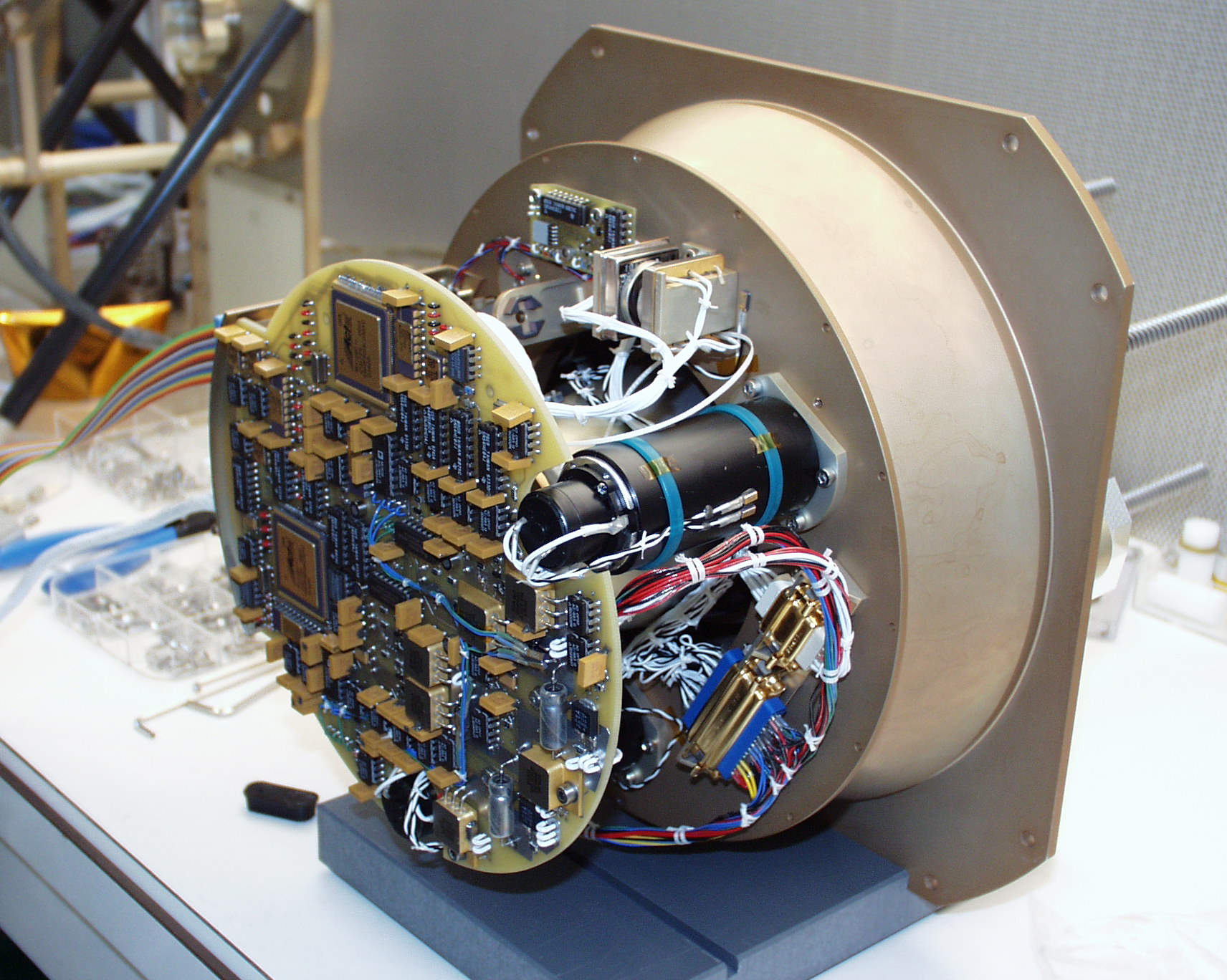
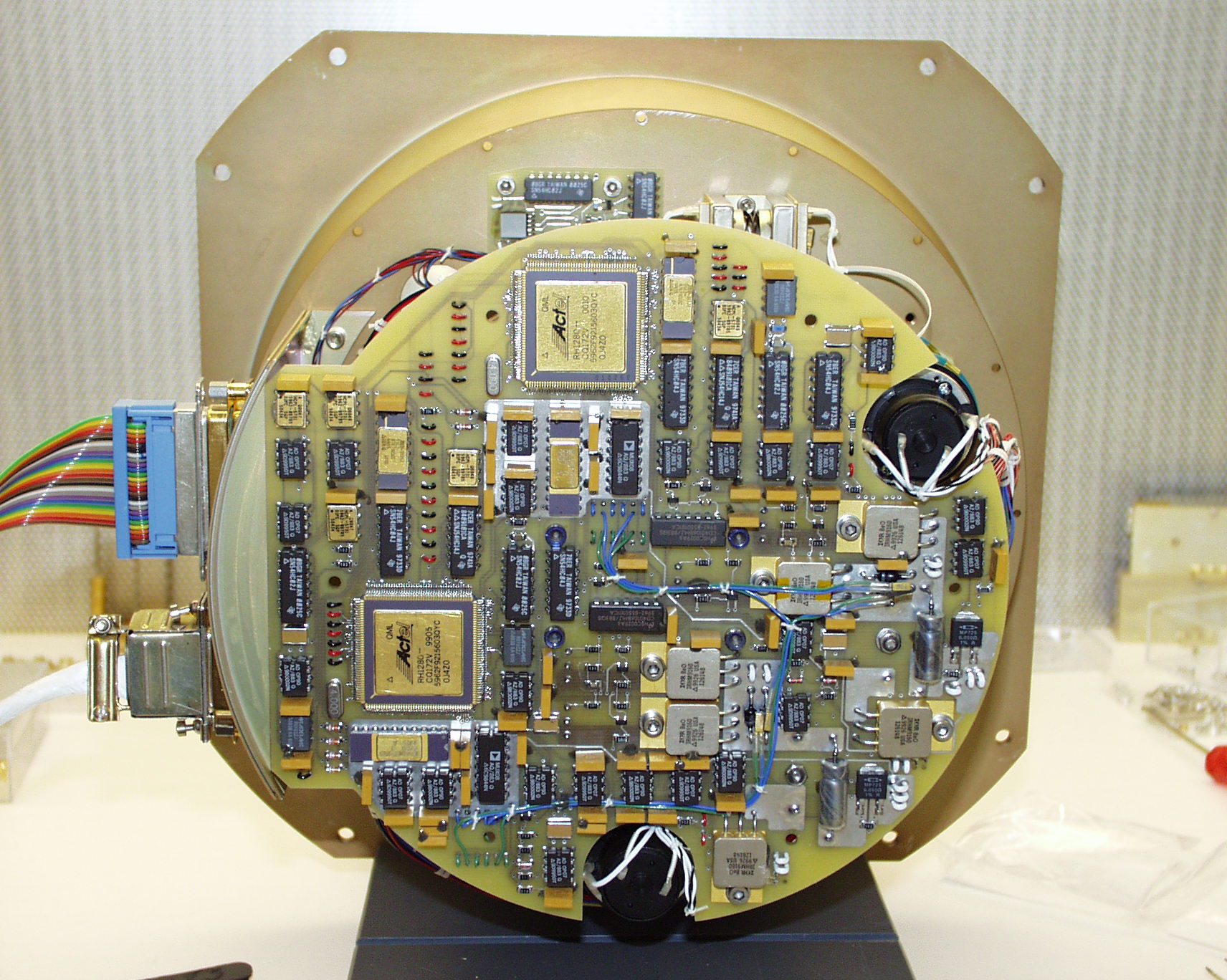
drei synchronisierte Gewindespindeln drücken mit ihren drei Spindelmuttern den Lander vom Orbiter weg. Die Spindeln (vierzügiges Trapezgewinde mit Steigung 12,7 mm) werden von Zahnriemen aus Polyurethan mit eingebetteten Mikro-Stahlseilen synchronisiert. Nach 22,75 Umdrehungen verlassen die Muttern das Ende der Spindeln – bis dahin muss die Abstoßgeschwindigkeit erreicht und stabilisiert sein. Angetrieben wird das ganze von zwei Hochleistungs-DC-Motoren mit angeflanschten Tachogeneratoren; jeder Motor hat seine eigene abgesicherte Stromversorgungsleitung vom Orbiter (2,25 A @ 28 V) und wird in einem eigenen Regelkreis mit seinem Tachogenerator betrieben (PID-Regler implementiert in strahlungstolerantem ACTEL FPGA). Falls ein Stromversorgungszweig während des Abstoßens abschalten sollte (zB durch Triggern des Latching Current Limiters des Orbiters),
konfiguriert sich die Elektronik in Echtzeit so um, dass der betroffene Motor stillgelegt und der andere Motor auf doppelten Strom (4,5 A) hochgeschaltet wird, so dass der Abstoßvorgang fortgesetzt werden kann. Für den Fall, dass in einem der beiden Regelkreise ein Hardware-Fehler auftritt und die beiden Kreise sich widersprechen und gegeneinander arbeiten, befindet sich an der dritten Spindel ein digitaler Inkremental-Encoder, dessen Signal laufend ausgewertet und mit den Werten der Tachogeneratoren verglichen wird.
Derjenige Regelkreis, dessen Wert nicht mit diesem „Schiedsrichter“ übereinstimmt, wird stillgelegt, und der verbleibende Antrieb auf doppelten Strom hochgeschaltet – ebenfalls in Echtzeit.
Einige Bilder vom Mechanismus:
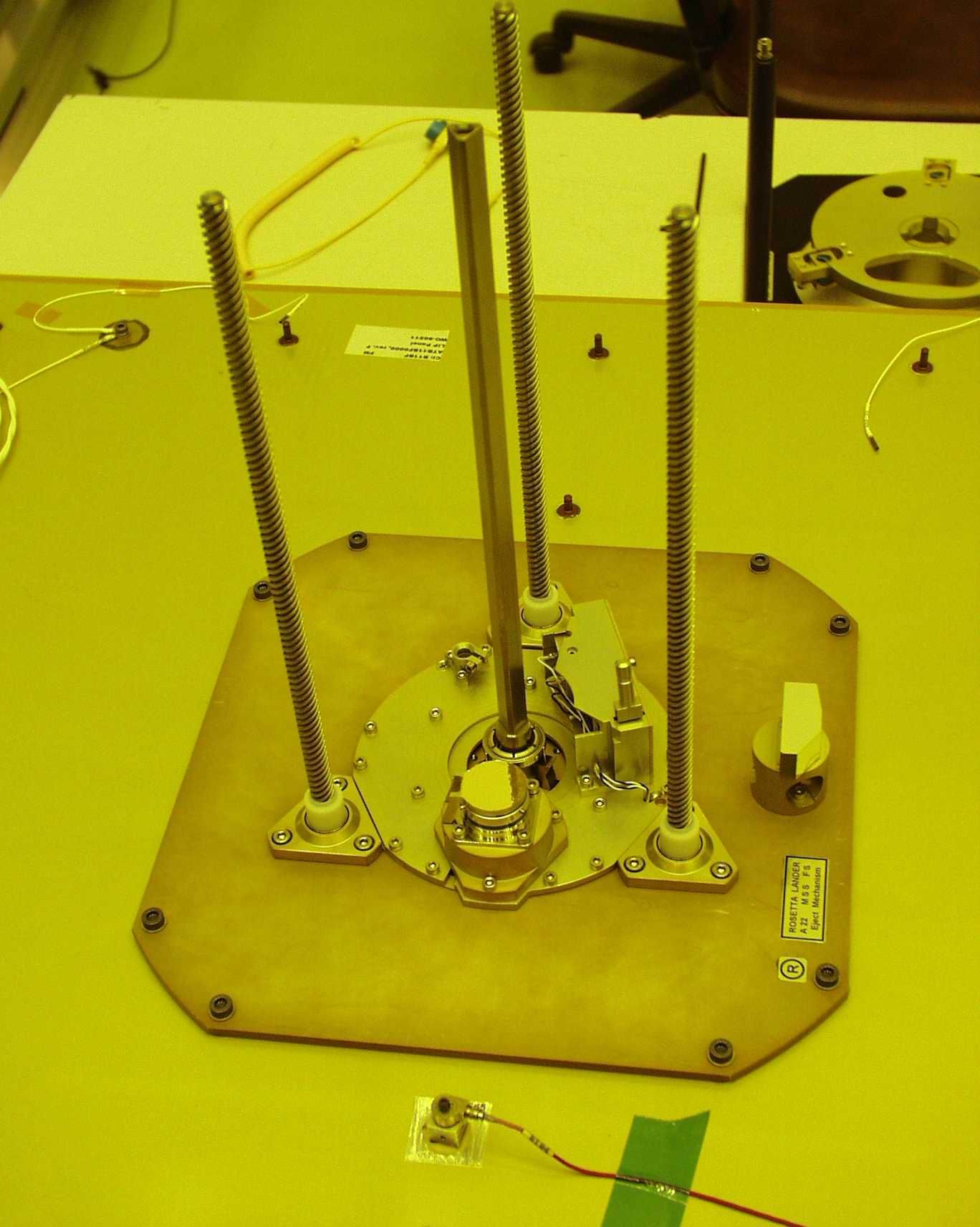

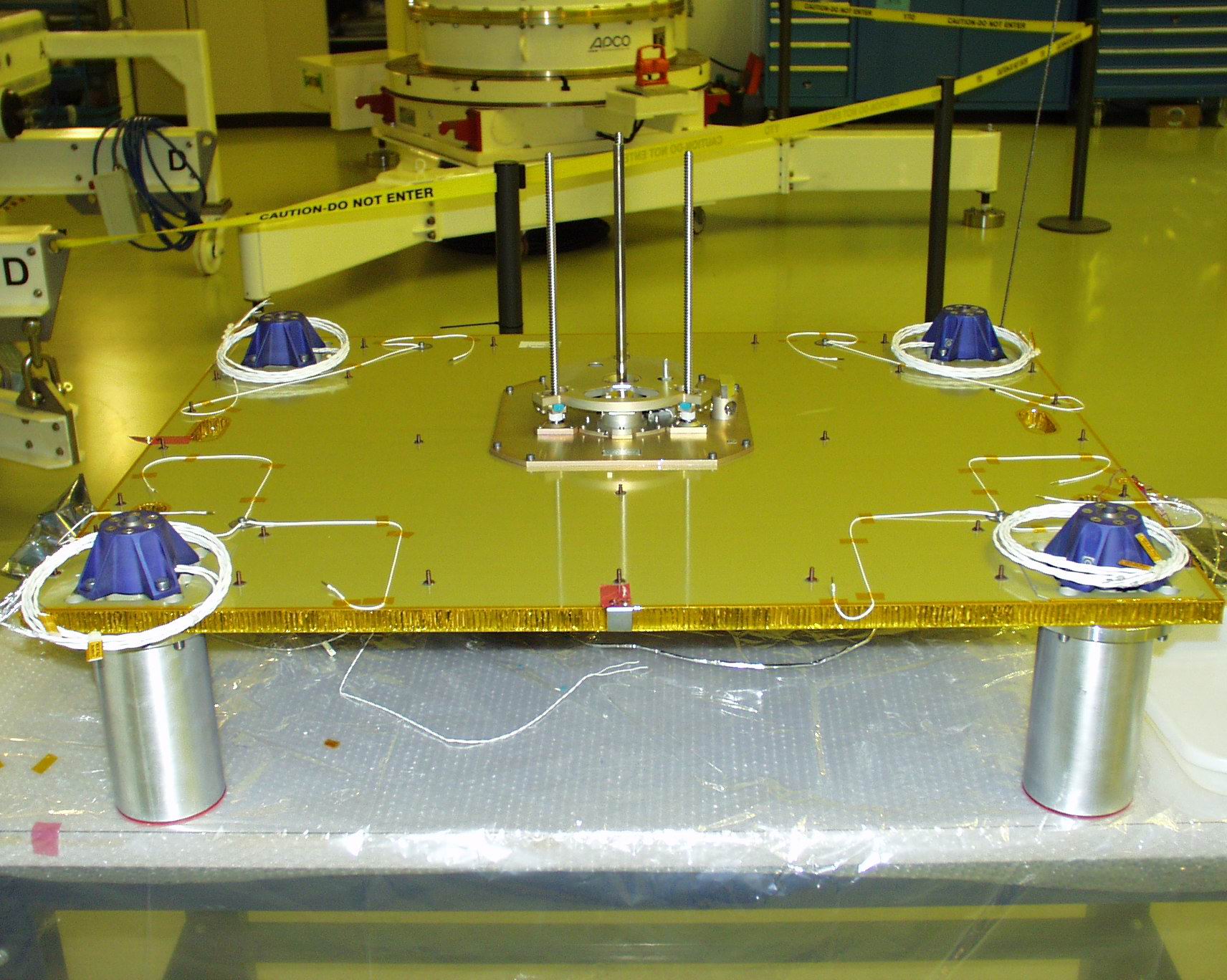
Auf diesem Bild ist das MSS in das Lander Interface Panel (LIP) des Orbiters eingebaut; zusätzlich sieht man die vier Separation Feet (blaue Kegelstümpfe), die den Lander während des Starts an den vier Ecken halten und danach freigeben.
Trotz aller dieser Redundanzmassnahmen muss zusätzlich noch die Möglichkeit vorgesehen werden, bei Versagen des gesamten Systems zu jedem Zeitpunkt den Lander trotzdem noch abtrennen zu können: dazu ist die Druckplatte mit den Spindelmuttern am Lander zweigeteilt. Die erste Halbschale (nut plate) trägt die drei isostatisch gelagerten Spindelmuttern, die zweite Halbschale (push plate) ist fest am Lander befestigt. Zwischen diesen beiden Halbschalen befindet sich eine vorgespannte Wellfeder; die beiden Halbschalen sind mechanisch miteinander verriegelt. Auf der Mittelachse der Spindelanordnung befindet sich einen Titanstange mit Dreikantquerschnitt, die genau so lang ist wie die Spindeln. Sie dient einmal als Führung während des Abstoßvorgangs, zum anderen ist sie zusätzlich an ihrer Wurzel drehbar gelagert. Eine 60 Grad-Drehung der Stange löst die Verriegelung zwischen nut plate und push plate und gibt die Wellfeder frei, die nun den Lander wegdrückt. Die Drehung der Notauslöse-Stange wird von einem pyrotechnischen Cable-Cutter bewirkt, dessen Zündung von der Pyro Firing Box des Orbiters kontolliert wird (d.h. es funktioniert auch, wenn die gesamte MSS-Elektronik „tot“ sein sollte). Die vorgespannte Wellfeder liefert natürlich nur ein festes delta-v von etwa 0,20 m/s, mit reduzierter Genauigkeit (+/-5 %), so dass dieser Emergency Eject-Modus eher als Notmassnahme zu betrachten ist für den Fall, dass bei einem Totalausfall des nominellen Eject-Mechanismus und unvollständiger Abtrennung der Orbiter selbst in Gefahr sein sollte.
Gruss HHg
(ich beantworte gerne weitere Fragen zu diesem Mechanismus)