Ich mach mal weiter auf dem Weg zum Mond mit dem nächsten Ziel für Luna 17:
4. Eintritt in den Mondorbit
Nach den beiden Transfer-Bahnkorrekturen ist die nächste wichtige Etappe der Eintritt in die Mondumlaufbahn.
Dazu führt Luna 17 das Bremsmanöver zum Eintritt in die Mondumlaufbahn aus. In Vorbereitung des Bremsmanövers muß die Station um 180° geschwenkt werden– Triebwerk in Flugrichtung.
Der Solarzellendeckel ist auch hier, wie bei den anderen aktiven Bahnmanövern geschlossen.
Ziel ist ein Anfangsmondorbit mit Bahnhöhe von ca. 90 km über der Mondoberfläche. (unterschiedliche Angaben)
Wie bei allen Bahnmanövern ist die korrekte Ausrichtung von Luna 17 sicherzustellen. Die nötigen Informationen zur Orientierung im Raum liefert u.a. das Astronavigationssystem.
Das Astronavigationssystem ist in der Mitte eines der abnehmbaren Zusatzmodules installiert und liefert Navigationsdaten auf Basis des „Mitbewegtes Bezugssystem“.
Im Bild ist die Einbauposition am linken Modul in der Mitte zwischen den Tanks zu erkennen (E 8 Luna 16 Referenz).
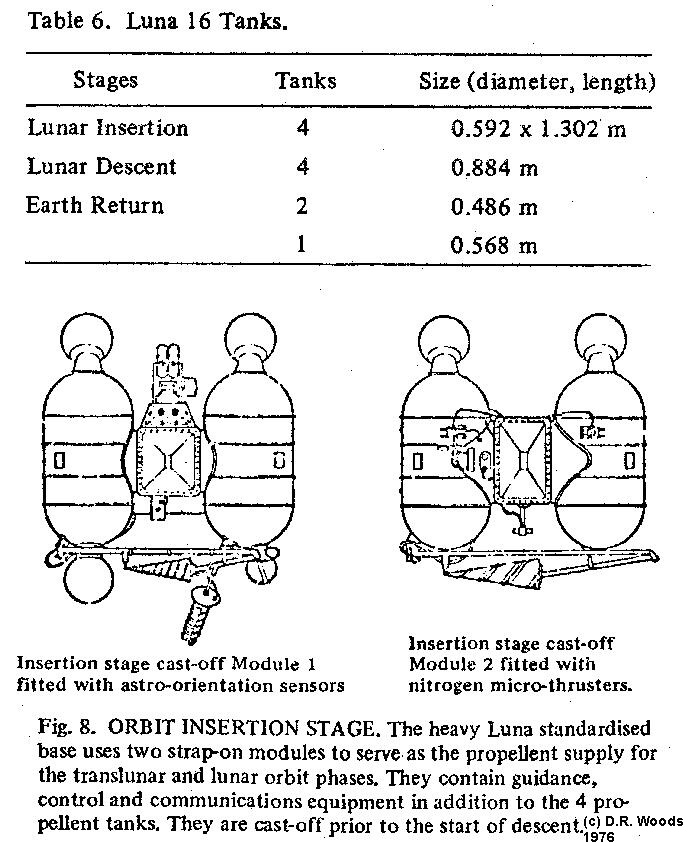
Entwicklungslieferant war eine Forschungs- und Produktionsvereinigung, die heutzutage unter dem Namen “ Московское опытно-конструкторское бюро "Марс" /” Moskauer Experimental Design Büro „Mars“ bekannt ist.
Das System mit der Bezeichnung A-31 besteht aus optisch-mechanischen Visiereinrichtungen und dazugehörigen mechatronischen Systemen. Es können Erde, Sonne und Mond je nach Fluglage über Strichmarken anvisiert werden.
Dabei wird als erstes eine Groborientierung durchgeführt, auf deren Basis jeweils eine Feinorientierung folgt.
Durch eine logische Operation wird eine Verwechslung der optischen Zielobjekte ausgeschlossen.
Zusätzlich sind Sensoren zur Ermittlung der Winkelgeschwindigkeit mit dem System kombiniert.
Im damaligen Flugzeitraum (10.11 – 17.11.1970) befand sich der Mond in der -361ten Lunation.
Hier mal die entsprechenden Mondphasen im Kalender November 1970.

Der Mond war zu diesem Zeitpunkt für das System mit ausreichender Helligkeit und Fläche sichtbar.
Mit dem Astronavigationssystem werden zusätzliche Lagedaten in Referenz zu Sonne und Erde gewonnen. Diese werden neben den bodengestützten Telemetrie/Trackingdaten noch mit Daten aus dem Gyroskopsystem verarbeitet.
Insgesamt werden vom Astronavigationssystem 2 Hauptaufgaben erfüllt.
1. Ermittlung von Daten zur dreiachsigen Orientierung im Raum vor der Durchführung von Bahnmanövern an mehreren Positionen des Fluges.
2. Ermittlung von Daten zur „groben“ Ausrichtung zur Sonne auf den freien Flugphasen als Ausrichtungsgrundlage der Einleitung der langsamen Drehung um die Längsachse.
Die Orientierungsdaten vor Bahnmanövern werden auch zum Gyrosystem übertragen um dieses jeweils zu aktualisieren. Während der Bahnmanöver und danach kann das Gyrosystem die schnellste Referenz für die Lageänderung darstellen.
Die grundsätzliche Ermittlung der Bahnpositions- bzw Raumlagedaten mit mehreren Systemen macht Sinn hinsichtlich möglicher Redundanz bzw. Abgleichbarkeit und auch dadurch, daß je nach Flugphase die Systeme unterschiedlich eingesetzt werden. Durch die Raumlage bzw. Arbeitsposition des Haupttriebwerks ergibt sich für das Astroorientierungssystem z.B. wechselnder Sichtbereich Sonne, Erde und Mond.
Das Astroorientierungssystem hat seine Hauptfunktionsbereich ab der Transferbahn zum Mond.
Im Erdorbit sind in Bezug auf die räumliche und zeitliche Nähe die bodengestützten Telemetrie/Trackingdaten als Informationsbasis noch geeignet.
Damit sind die Lagedaten aus Telemetrie/Tracking, Gyrosystem und Astronavigation teilweise ergänzend bzw. zur Systemabstimmung verfügbar.
------- --------- ---------
Astronavigation und Lageregelung:
Zur Lageregelung bzw. Drehung der Station um die Hauptachsen wird während der Transferflugphase ein Kaltgasdüsensystem auf Stickstoffbasis eingesetzt, welches direkt mit dem Astronavigationssystem verblockt ist.
Am zweiten Zusatzmodul sind auf der gegenüberliegenden Seite des Astronavigationssystems entsprechende Düsenpaare angebracht. Auf dem Modul befindet sich ein Arm, der das obere Düsensystem trägt.
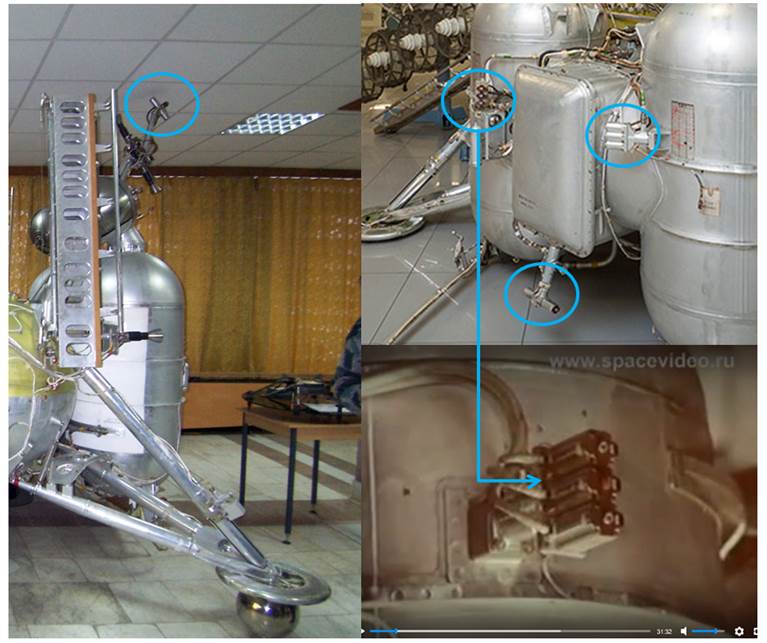
Der Düsenblock für die Haupt- Drehbewegung ist als 3er-Modul ausgeführt. Das deutet auf eine Besonderheit in dieser Bewegung hin. Es könnte für eine größeren Schubbereich, der auch dreifach dosierbar ist sorgen – oder bei geöffnetem/geschlossenen Solarzellendeckel einen wahlweisen Positionsausgleich gegen die „Unwucht“ schaffen, die dann dort in der Hauptrichtung liegt. Damit wäre dann eine, einer Schwenkdüse vergleichbare Funktion realisierbar (z.B. nur 1 von 3 oder 2 von 3 betreiben).
Die verblockte Einheit Astronavigationssystem + Kaltgasdüsensystem muß seine Funktion bis kurz vor der finalen Landephase erfüllen. Danach werden beide Systeme mit der Abtrennung der Zusatzmodule (leere Tanks etc.) vom Landemodul entfernt.
Die verblockte Einheit verfügt über eigene Energieversorgung, Avionik etc.
D.h. hier ist quasi das Prinzip einer Stufenabtrennung nach Verbrauch des Treibstoffs und nach dem Ende ihrer Funktionsdauer als Konzept realisiert. Damit verringert sich die Landemasse, was wiederum entsprechende Vorteile mit sich bringt.
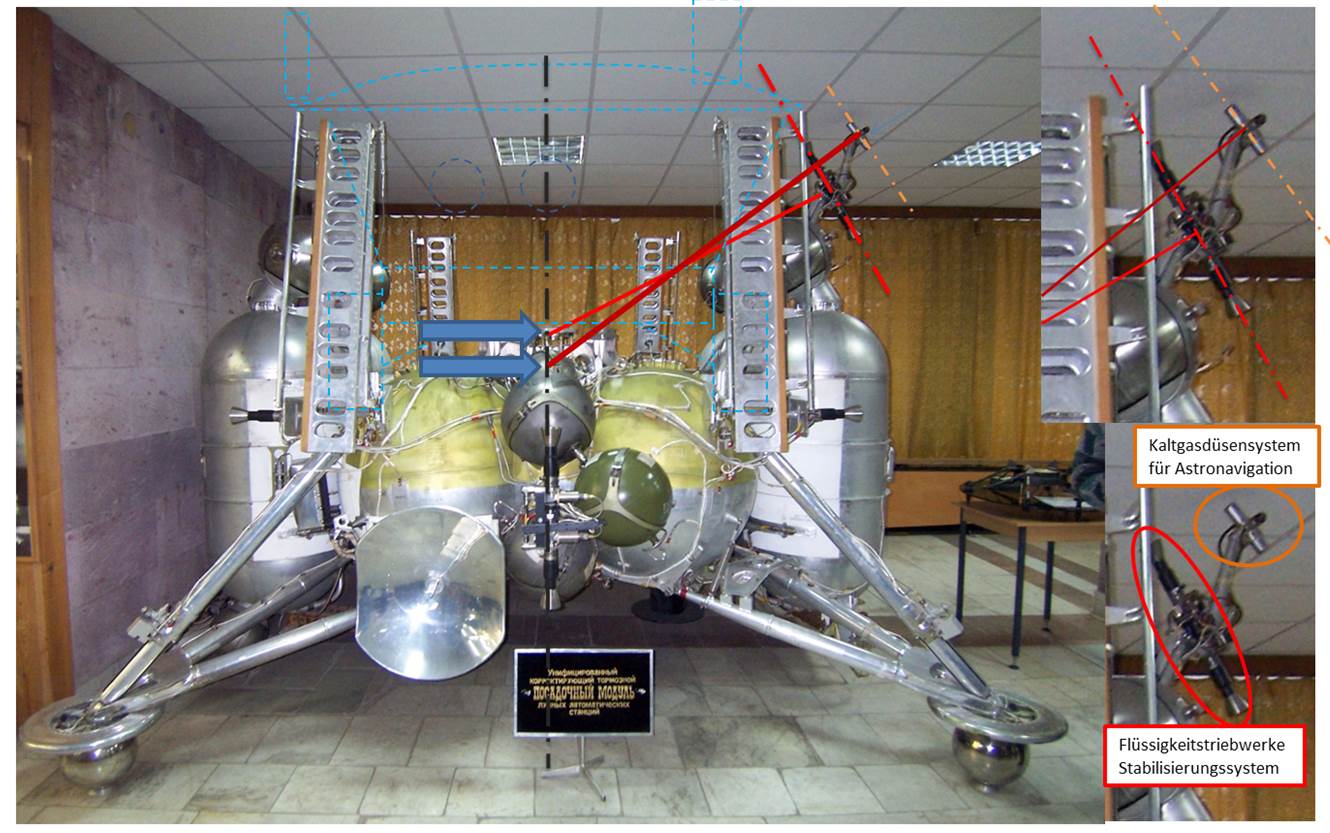
Interessant ist noch die Ausrichtung des oberen Kaltgas-Düsenpaares an dem langen Arm.
Auch für das Flüssigkeitstriebwerk-Stabilisierungssystem ist ein Düsenpaar an einem Ausleger in ähnlicher Position, neben dem Kaltgassystem vorhanden.
Unter der Annahme, daß die Düsenpaare bei beiden Systemen jeweils tangential zum Masseschwerpunkt ausgerichtet sind, ergeben sich Rückschlüsse auf die Veränderung des selbigen nach dem Abtrennen der Zusatzmodule.
Ich hab mal eine Hilfslinienskizze erstellt. Der Schwerpunkt liegt nach der Abtrennung die Zusatztanks höher. Das ist eine tendenzielle Aussage. Die Lage des Schwerpunktes verändert sich ja auch in den Flugphasen durch Treibstoffverbrauch etc. Die Seitendüsen liegen auch etwas niedriger als die skizzierten Schnittpunkte. Ich denke aber, daß das in die Richtung geht.
Damit ist ein konzeptionelles „Nachtrimmen“ gewährleistet, da nach der Abtrennung der Zusatzmodule das Flüssigkeitstriebwerk-Stabilisierungssystem in der Abstiegsphase aktiv wird.
Quellen:
http://www.ninfinger.org/models/vault/Luna%20Probes/http://www.mars-mokb.ru/eng/history.htmlhttp://www.uledoc.de/kalender/kalender.html?yy=1970&lang=de_DE.UTF8&mode=2http://metalyuga.livejournal.com/54490.htmlScreenshots aus dem Объект "Е-8" Film.
dksk