Weiter geht es mit den wissenschaftlichen Geräten, die übrigens von der Lunochod 1 zur Lunochod 2 – Mission hin modifiziert, verbessert und auch weiter ergänzt wurden.
Quellensammlung für die Ausführungen:
http://web.archive.org/web/20090621014815/http://www.flug-revue.rotor.com/FRHeft7X/FRHeft74/FRH7410/FR7410c.htmhttp://www.raumfahrtkalender.de/thema-des-monats/januar-1973http://dic.academic.ru/dic.nsf/enc_physics/2472/%D0%A0%D0%95%D0%9D%D0%A2%D0%93%D0%95%D0%9D%D0%9E%D0%92%D0%A1%D0%9A%D0%98%D0%99http://refdb.ru/look/1200250-pall.htmlhttp://stp.cosmos.ru/uploads/media/Lunokhod_talk_Microrover_workshop.pdfhttp://nauka.relis.ru/05/9804/05804059.htmhttp://epizodsspace.no-ip.org/bibl/znan/1978/02/2-him-lun-gr.html - - - - - - - - - - RIFMA Röntgenfluoreszenz-Spektrometer - - - - - - - - -
Entwicklungslieferant war das Institut „Kocharov“.
RIFMA war am vorderen Bereich des Fahrzeuges mittig in ca. 30 cm Höhe installiert.
Hauptbestandteile sind die Hauptgerätebox und zwei seitlich angeordnete Platten.
Es besteht aus einer Isotopenquelle , die den untersuchten Bereich des Bodens bestrahlt und dadurch induzierte Röntgenemission von Atomen der verschiedenen Elemente der Mondoberfläche hervorruft. Diese werden im Detektorblock empfangen.
1 – панели с радиоактивными источниками; ---- radioaktive Strahlenquellen;
2 – исследуемый грунт; ----- untersuchter Boden
3 – блок детекторов флуоресцентного излучения ---- Block mit Fluoreszenzstrahlungsdetektoren
Der Strahlenempfängerblock ist ein System von speziell entwickelten Proportionalzählern mit (Stoff)charakteristischen Filtern. Die Informationen auf dem Energiespektrum und die Intensität der Röntgenstrahlen werden durch einen Analysator (64-Kanal-Amplitude) aufgezeichnet.
Darstellung der Proportionalzähler des RIFMA Systems
Das RIFMA hatte die Aufgabe, die charakteristischen chemischen Hauptelemente an der Oberfläche der verschiedenen Mondgebiete zu ermitteln.
An einigen Stellen wurden vom Lunochod spezielle Fahrmanöver (Radpaare als Bodenfräse) durchgeführt um die Bodenschicht bis in eine Tiefe von ca. 10 cm freizulegen. Diese Stellen wurden mit dem RIFMA System dann ebenfalls analysiert.
Hier eine Zusammenstellung von Forschungsergebnissen:
ftp://ftp.lpi.usra.edu/pub/outgoing/lpsc2009/full802.pdfBasierend auf den Ergebnissen der RIFMA – Analysen gab es Überlegungen eine indirekte erdgebundene optische Oberflächenanalyse (die deutlich weniger Aufwand bedeutete) zu erproben.
Es wurde von der Erde aus mit leistungsstarken Teleskopen die Oberfläche des Kraters Le Monnier (Landegebiet Lunochod 2) fotografiert. Die mit den Aufnahmen bestimmte Helligkeit der Mondgebiete entlang der Fahrstrecke des Mondmobils und ihre vermeintliche chemische Zusammensetzung wurden mit den vor Ort ermittelten RIFMA – Werten verglichen.
Dabei stellte sich ein sehr hoher Übereinstimmungsgrad heraus, welcher die Basis der nachfolgend in diesem Bereich intensivierten erdgebundenen Mondbeobachtung- und Analyse bildete.
- - - - - - Radiation Detektor RV-2N - - - - - - -
Entwicklungslieferant war das Institut „Chuchkov“.
Das Radiometer RW-2N untersuchte die kosmische Teilchenstrahlung der Sonne (Protonen– und Alphastrahlung) und der Galaxis mittels Halbleiter-Detektoren und Zählrohren.
Dabei standen die Ermittlung der Werte der Grundstrahlung sowie lokale Unterschiede im Vordergrund. Diese Daten stellten auch die Basis für die Planung nachfolgender bemannter Missionen dar.
- - - - - - -Astrophotometer AF-3L- - - - - - - (nur bei Lunochod 2)
Entwicklungslieferant war das Institut „Zvereva“.
Mit dem Astrophotometer wurden verschiedene Messungen im Bereich des sichtbaren Lichts und ultravioletter Strahlung vorgenommen.
Als Strahlungsempfänger dienten fotoelektrische Vervielfacher (Sekundärelektronenvervielfacher).
Es ist mit einer drehbaren Filterplatte ausgestattet, mit der man die empfangene Strahlungsintensität nach künstlich vorgeeichten Lichtquellen bestimmen kann.
Mit dem Photometer wurde jeweils 12 Aufnahmen erstellt, von denen 9 am MONDTAG, 1 in der MONDNACHT, und 2 in der Monddämmerung gemacht wurden. Aufgrund der Helligkeitsunterschiede wurde eine Art „Streulicht“ erkannt, welches damals schon mit einer Mondstaubschwebetheorie erklärt wurde.
- - - - - - - Laser/Photodetektor Rubin 1- - - - - (nur bei Lunochod 2)-
Das Rubin 1 System diente zum Detektieren eines von der Erde gezielt gesendeten Laserstrahls, zur genauen Ermittlung der Fahrzeugposition.
Zu diesem Zweck richteten man ein Teleskop auf den Südostteil des Kraters Le Monnier (Landegebiet Lunochod 2). Danach wurden nacheinander Rubin-Laserimpulse in einer das Zielgebiet überdeckenden spiralförmigen Projektionsbahn ausgesendet. Gleichzeitig mit dem Senden des jeweiligen Laserimpulses wurde dessen Abstrahlrichtung/Zielmarke gemessen und ein zugehöriges Zielfoto des Kratergebietes gemacht. Traf ein Laserimpuls den Rubin1 Detektor, so wurde ein elektrisches Signal erzeugt und zur Erde gesendet.
Nach Kompensation der Zeitdifferenz/Signallaufzeit konnte dieses Signal einer Abstrahlrichtung/Zielmarke zugewiesen – und somit die Position des Fahrzeuges relativ genau ermittelt werden.
- - - - - - - - Magnetometer SG 70 A – - - - - - - - (nur bei Lunochod 2)
Entwicklungslieferant war das Institut „Dolginov“.
Das Magnetometer war an einem 1,5 m langen Ausleger am Fahrzeug befestigt, der erst nach der Anlandung aus der Transportstellung seitlich vor den Lunochod geklappt wurde.
Die Daten des Magnetometers wurden sowohl im Stand als auch während der Fahrt ermittelt. Damit konnte festgestellt werden, wie sich die magnetischen Eigenschaften des Mondbodens entlang der Fahrstrecke verändern.
-- - - - - - - - - - - -RT 1 Kollimator Röntgenteleskop - - - - - -
Das Röntgenteleskop des Lunochod war sehr einfach aufgebaut ( stellte erste Gerätegeneration dieser damals noch jungen Forschungsrichtung dar). Bekanntlich hat die Erdatmosphäre eine abschirmende Wirkung gegenüber kosmischer Röntgenstrahlung. Daher ist die Analyse dieser Strahlung oberhalb der Atmosphäre z. B. mit Satelliten von Interesse. Ein Röntgenteleskop auf der Mondoberfläche macht Sinn, wenn ein bestimmter Bereich des Kosmos genauer untersucht werden soll. Anders als bei einer Erdorbitalbahn (Satellit), ist die relative Bewegungsbahn eines Punktes auf der Mondoberfläche in Bezug auf einen Beobachtungssektor im Kosmos sehr gering. Damit können Langzeitbeobachtungen mit hoher Wiederholgenauigkeit durchgeführt werden.
Mit dem Röntgenteleskop RT-1 wurden die Galaxie, Sterne und Sonne beobachtet um Erkenntnisse über deren ausgesandte Röntgen-/Gammastrahlung zu gewinnen.
Der Grundaufbau bestand aus einem optischen Sensor und 2 Strahlungsdetektoren, die im Energiebereich von 2 -10 keV ihren Arbeitsbereich hatten.
Dabei wurden die direkt einfallenden Röntgenphotonen mit der Hintergrundstrahlung vergleichen (daher 2 Sensoren) um daraus einen Effektivwert zu ermitteln.
Hier ein Prinzipbild zum Aufbau eines Röntgenteleskopes. Im oberen Bereich sind die 3 Hauptelemente:
оптический детектор ярких объектов – optischer Detektor heller Objekte
звезды датчик – Sternsensor
пропорциональный счётчик – Proportionalzähler (unter Kollimator) mit Auswerteeinheit
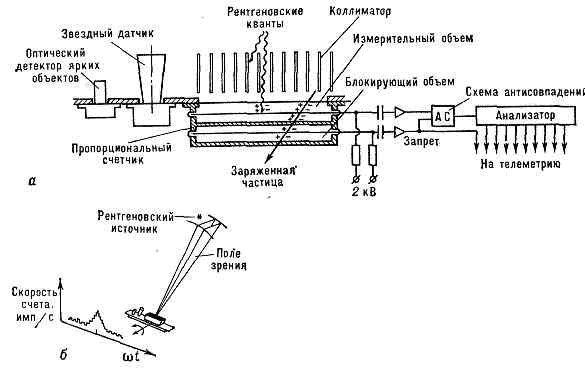
Eine langsame Rotation des Mondes um seine Achse (eine Umdrehung in 27,3 Erdentagen) ergibt ein sehr langsames Gleiten des „Sichtfeldes“ des Teleskops gegenüber der Himmelskugel. Innerhalb der Arbeitsphasen, je 18-20 Stunden wird somit ein Winkelsektor von 9°-10° überstrichen. (360°/27,3 d = 13,186 °/d; 13,186°/24h*18h = 9,89° in 18 Stunden)
dksk